Как рассчитать перспективное преобразование для OpenCV по углам поворота?
Я хочу вычислить перспективное преобразование (матрица для функции warpPerspective), начиная с углов поворота и расстояния до объекта.
Как это сделать?
Я нашел код где-то на OE. Пример программы ниже:
#include <opencv2/objdetect/objdetect.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream>
#include <math.h>
using namespace std;
using namespace cv;
Mat frame;
int alpha_int;
int dist_int;
int f_int;
double w;
double h;
double alpha;
double dist;
double f;
void redraw() {
alpha = (double)alpha_int/1000.;
//dist = 1./(dist_int+1);
//dist = dist_int+1;
dist = dist_int-50;
f = f_int+1;
cout << "alpha = " << alpha << endl;
cout << "dist = " << dist << endl;
cout << "f = " << f << endl;
// Projection 2D -> 3D matrix
Mat A1 = (Mat_<double>(4,3) <<
1, 0, -w/2,
0, 1, -h/2,
0, 0, 1,
0, 0, 1);
// Rotation matrices around the X axis
Mat R = (Mat_<double>(4, 4) <<
1, 0, 0, 0,
0, cos(alpha), -sin(alpha), 0,
0, sin(alpha), cos(alpha), 0,
0, 0, 0, 1);
// Translation matrix on the Z axis
Mat T = (Mat_<double>(4, 4) <<
1, 0, 0, 0,
0, 1, 0, 0,
0, 0, 1, dist,
0, 0, 0, 1);
// Camera Intrisecs matrix 3D -> 2D
Mat A2 = (Mat_<double>(3,4) <<
f, 0, w/2, 0,
0, f, h/2, 0,
0, 0, 1, 0);
Mat m = A2 * (T * (R * A1));
cout << "R=" << endl << R << endl;
cout << "A1=" << endl << A1 << endl;
cout << "R*A1=" << endl << (R*A1) << endl;
cout << "T=" << endl << T << endl;
cout << "T * (R * A1)=" << endl << (T * (R * A1)) << endl;
cout << "A2=" << endl << A2 << endl;
cout << "A2 * (T * (R * A1))=" << endl << (A2 * (T * (R * A1))) << endl;
cout << "m=" << endl << m << endl;
Mat frame1;warpPerspective( frame, frame1, m, frame.size(), INTER_CUBIC | WARP_INVERSE_MAP);
imshow("Frame", frame);
imshow("Frame1", frame1);
}
void callback(int, void* ) {
redraw();
}
void main() {frame = imread("FruitSample_small.png", CV_LOAD_IMAGE_COLOR);
imshow("Frame", frame);
w = frame.size().width;
h = frame.size().height;
createTrackbar("alpha", "Frame", &alpha_int, 100, &callback);
dist_int = 50;
createTrackbar("dist", "Frame", &dist_int, 100, &callback);
createTrackbar("f", "Frame", &f_int, 100, &callback);
redraw();
waitKey(-1);
}
Но, к сожалению, это преобразование делает что-то странное
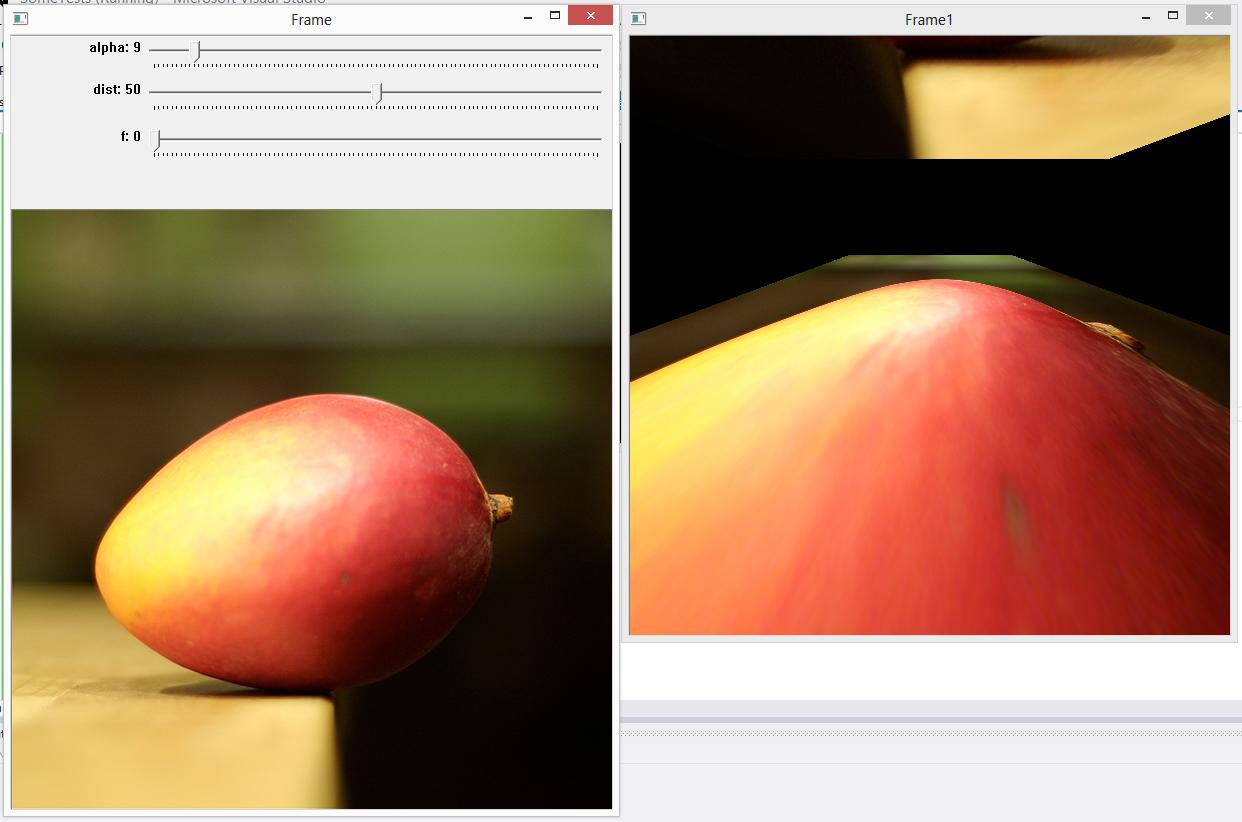
Зачем? Какая другая половина изображения выше, когда alpha>0? А как вращаться вокруг других осей? Зачем dist работает так странно?
Решение
У меня была роскошь времени, чтобы обдумать и математику, и код. Я сделал это год или два назад. Я даже набрал это в прекрасном LaTeX.
Я намеренно разработал свое решение таким образом, чтобы независимо от того, какие углы поворота были указаны, все входное изображение содержалось в центре выходного кадра, который в противном случае является черным.
Аргументы в мой warpImage Функция — это углы поворота по всем 3 осям, масштабный коэффициент и вертикальный угол поля зрения. Функция выводит матрицу деформации, выходное изображение и углы исходного изображения в пределах выходного изображения.
Математика (для кода, смотрите ниже)


Исходный код LaTeX Вот.
Кодекс (для математики, смотрите выше)
Вот тестовое приложение, которое деформирует камеру
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <math.h>using namespace cv;
using namespace std;static double rad2Deg(double rad){return rad*(180/M_PI);}//Convert radians to degrees
static double deg2Rad(double deg){return deg*(M_PI/180);}//Convert degrees to radiansvoid warpMatrix(Size sz,
double theta,
double phi,
double gamma,
double scale,
double fovy,
Mat& M,
vector<Point2f>* corners){
double st=sin(deg2Rad(theta));
double ct=cos(deg2Rad(theta));
double sp=sin(deg2Rad(phi));
double cp=cos(deg2Rad(phi));
double sg=sin(deg2Rad(gamma));
double cg=cos(deg2Rad(gamma));
double halfFovy=fovy*0.5;
double d=hypot(sz.width,sz.height);
double sideLength=scale*d/cos(deg2Rad(halfFovy));
double h=d/(2.0*sin(deg2Rad(halfFovy)));
double n=h-(d/2.0);
double f=h+(d/2.0);
Mat F=Mat(4,4,CV_64FC1);//Allocate 4x4 transformation matrix F
Mat Rtheta=Mat::eye(4,4,CV_64FC1);//Allocate 4x4 rotation matrix around Z-axis by theta degrees
Mat Rphi=Mat::eye(4,4,CV_64FC1);//Allocate 4x4 rotation matrix around X-axis by phi degrees
Mat Rgamma=Mat::eye(4,4,CV_64FC1);//Allocate 4x4 rotation matrix around Y-axis by gamma degrees
Mat T=Mat::eye(4,4,CV_64FC1);//Allocate 4x4 translation matrix along Z-axis by -h units
Mat P=Mat::zeros(4,4,CV_64FC1);//Allocate 4x4 projection matrix
//Rtheta
Rtheta.at<double>(0,0)=Rtheta.at<double>(1,1)=ct;
Rtheta.at<double>(0,1)=-st;Rtheta.at<double>(1,0)=st;
//Rphi
Rphi.at<double>(1,1)=Rphi.at<double>(2,2)=cp;
Rphi.at<double>(1,2)=-sp;Rphi.at<double>(2,1)=sp;
//Rgamma
Rgamma.at<double>(0,0)=Rgamma.at<double>(2,2)=cg;
Rgamma.at<double>(0,2)=-sg;Rgamma.at<double>(2,0)=sg;
//T
T.at<double>(2,3)=-h;
//P
P.at<double>(0,0)=P.at<double>(1,1)=1.0/tan(deg2Rad(halfFovy));
P.at<double>(2,2)=-(f+n)/(f-n);
P.at<double>(2,3)=-(2.0*f*n)/(f-n);
P.at<double>(3,2)=-1.0;
//Compose transformations
F=P*T*Rphi*Rtheta*Rgamma;//Matrix-multiply to produce master matrix
//Transform 4x4 points
double ptsIn [4*3];
double ptsOut[4*3];
double halfW=sz.width/2, halfH=sz.height/2;
ptsIn[0]=-halfW;ptsIn[ 1]= halfH;
ptsIn[3]= halfW;ptsIn[ 4]= halfH;
ptsIn[6]= halfW;ptsIn[ 7]=-halfH;
ptsIn[9]=-halfW;ptsIn[10]=-halfH;
ptsIn[2]=ptsIn[5]=ptsIn[8]=ptsIn[11]=0;//Set Z component to zero for all 4 components
Mat ptsInMat(1,4,CV_64FC3,ptsIn);
Mat ptsOutMat(1,4,CV_64FC3,ptsOut);
perspectiveTransform(ptsInMat,ptsOutMat,F);//Transform points
//Get 3x3 transform and warp image
Point2f ptsInPt2f[4];
Point2f ptsOutPt2f[4];
for(int i=0;i<4;i++){
Point2f ptIn (ptsIn [i*3+0], ptsIn [i*3+1]);
Point2f ptOut(ptsOut[i*3+0], ptsOut[i*3+1]);
ptsInPt2f[i] = ptIn+Point2f(halfW,halfH);
ptsOutPt2f[i] = (ptOut+Point2f(1,1))*(sideLength*0.5);
}
M=getPerspectiveTransform(ptsInPt2f,ptsOutPt2f);
//Load corners vector
if(corners){
corners->clear();
corners->push_back(ptsOutPt2f[0]);//Push Top Left corner
corners->push_back(ptsOutPt2f[1]);//Push Top Right corner
corners->push_back(ptsOutPt2f[2]);//Push Bottom Right corner
corners->push_back(ptsOutPt2f[3]);//Push Bottom Left corner
}
}
void warpImage(const Mat &src,
double theta,
double phi,
double gamma,
double scale,
double fovy,
Mat& dst,
Mat& M,
vector<Point2f> &corners){
double halfFovy=fovy*0.5;
double d=hypot(src.cols,src.rows);
double sideLength=scale*d/cos(deg2Rad(halfFovy));
warpMatrix(src.size(),theta,phi,gamma, scale,fovy,M,&corners);//Compute warp matrix
warpPerspective(src,dst,M,Size(sideLength,sideLength));//Do actual image warp
}int main(void){
int c = 0;
Mat m, disp, warp;
vector<Point2f> corners;
VideoCapture cap(0);
while(c != 033 && cap.isOpened()){
cap >> m;
warpImage(m, 5, 50, 0, 1, 30, disp, warp, corners);
imshow("Disp", disp);
c = waitKey(1);
}
}
Другие решения
Я получил подобную проблему. Проблема оказывается в том, что после обратного проецирования в 3D-координаты, поскольку у нас нет внутренних параметров камеры, мы используем какое-то значение догадки или даже 1, как в вашей матрице. A1, Во время вращения это может привести к тому, что плоскость изображения на «изнаночной стороне» плоскости изображения будет иметь отрицательное значение глубины (z < 0) После проекции, когда вы делите свои координаты с z вы получаете что-то странное, как то, что вы показали.
Таким образом, решение оказалось масштабировать длину фокусного расстояния, чтобы быть что-то относительно размера вашего изображения.
скажем, ваше изображение имеет размерность (H, W)установите длину фокусировки, например H/3,
В этом случае ваш A1 будет
[H/3, 0, W/2]
[0, H/3, H/2]
[0, 0, 1]