Звездный алгоритм без диагонального движения
Ситуация:
Я пытаюсь перевести алгоритм A * в код на c ++, где не допускается перемещение по диагонали, но у меня странное поведение.
мой вопрос: Необходимо ли также учитывать диагональную стоимость, даже если диагональное перемещение невозможно.
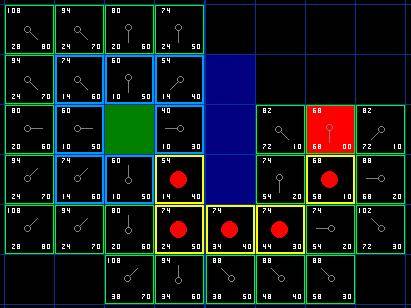
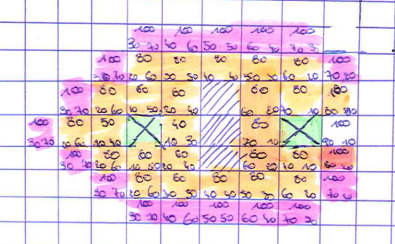
Когда я делаю вычисления без диагональной стоимости (с эвристическим коэффициентом 10), у меня всегда один и тот же показатель fscore, равный 80 (вы можете увидеть это на втором рисунке, где я вычисляю fscore, gscore и hscore), и это кажется действительно странным мне. Из-за этого (почти все узлы, имеющие fscore 80), алгоритм, кажется, не работает, потому что у многих узлов есть тот же самый маленький fscore 80.
Или это нормальное поведение, и будет ли реализация A * star без диагонали выполнять намного больше работы (потому что больше узлов имеют одинаковое минимальное значение fscore)?
Я не думаю, что этот вопрос имеет какое-либо отношение к моему коду, а не к моим рассуждениям, но я все равно публикую его:
pathFind.cpp
#include "pathFind.h"#include <queue>
#include "node.h"#include <QString>
#include <QDebug>
#include <iostream>
/** Pathfinding (A* algo) using Manhatten heuristics and assuming a monotonic, consistent
* heuristic (the enemies do not change position)
*
* TODO: add variable terrain cost
**/
//dimensions
const int horizontalSize = 20;
const int verticalSize = 20;
//nodes sets
static int closedNodes[horizontalSize][verticalSize]; //the set of nodes already evaluated
static int openNodes[horizontalSize][verticalSize]; // the set of nodes to be evaluated; initialy only containing start node
static int dir_map[horizontalSize][verticalSize]; //map of directions (contains parents-children connection)
//directions
const int dir=4;
static int dirX[dir]={1,0,-1,0};
static int dirY[dir]={0,1,0,-1};
//test class
static int map[horizontalSize][verticalSize]; //map of navigated nodes
pathFind::pathFind(){
//test
srand(time(NULL));
//create empty map
for (int y=0;y<verticalSize;y++){
for (int x=0;x<horizontalSize;x++){
map[x][y]=0;
}
}
//fillout matrix
for (int x=horizontalSize/8;x<horizontalSize*7/8;x++){
map[x][verticalSize/2]=1;
}
for (int y=verticalSize/8;y<verticalSize*7/8;y++){
map[horizontalSize/2][y]=1;
}
//randomly select start and finish locations
int xA,yA,xB,yB;
int n=horizontalSize;
int m=verticalSize;
xA=6;
yA=5;
xB = 14;
yB = 12;
qDebug() <<"Map Size (X,Y): "<<n<<","<<m<<endl;
qDebug()<<"Start: "<<xA<<","<<yA<<endl;
qDebug()<<"Finish: "<<xB<<","<<yB<<endl;// get the route
clock_t start = clock();
QString route=calculatePath(xA, yA, xB, yB);
if(route=="") qDebug() <<"An empty route generated!"<<endl;
clock_t end = clock();
double time_elapsed = double(end - start);
qDebug()<<"Time to calculate the route (ms): "<<time_elapsed<<endl;
qDebug()<<"Route:"<<endl;
qDebug()<<route<<endl<<endl;
}
QString pathFind::calculatePath(const int & xStart, const int & yStart,const int & xFinish, const int & yFinish){
/** why do we maintain a priority queue?
* it's for maintaining the open list: everytime we acces the open list we need to find the node with the lowest
* fscore. A priority queue is a sorted list so we simply have to grab (pop) the first item of the list everytime
* we need a lower fscore.
*
* A priority queue is a data structure in which only the largest element can be retrieved (popped).
* It's problem is that finding an node in the queue is a slow operation.
**/
std::priority_queue<node> pq[2]; //we define 2 priority list which is needed for our priority change of a node 'algo'
static int index; //static and global variables are initialized to 0
static node *currentNode;
static node *neighborNode;
//first reset maps
resetMaps();
//create start node
static node * startNode;
startNode= new node(xStart,yStart,0,0);
startNode->updatePriority(xFinish, yFinish);
// push it into the priority queue
pq[index].push(*startNode);
//add it to the list of open nodes
openNodes[0][0] = startNode->getPriority();
//A* search
//while priority queue is not empty; continue
while(!pq[index].empty()){
//get current node with the higest priority from the priority list
//in first instance this is the start node
currentNode = new node(pq[index].top().getxPos(),
pq[index].top().getyPos(),
pq[index].top().getDistance(),
pq[index].top().getPriority());
//remove node from priority queue
pq[index].pop();
openNodes[currentNode->getxPos()][currentNode->getyPos()]=0; //remove node from open list
closedNodes[currentNode->getxPos()][currentNode->getyPos()]=1; //add current to closed list
//if current node = goal => finished => retrace route back using parents nodes
if (currentNode->getxPos()==xFinish && currentNode->getyPos()==yFinish){
//quit searching if goal is reached
//return generated path from finish to start
QString path="";
int x,y,direction; //in cpp you don't need to declare variables at the top compared to c
//currentNode is now the goalNode
x=currentNode->getxPos();
y=currentNode->getyPos();
while (!(x==xStart && y==yStart)){
/** We start at goal and work backwards moving from node to parent
* which will take us to the starting node
**/
direction=dir_map[x][y];
path =(direction+dir/2)%dir+path; //we work our way back
//iterate trough our dir_map using our defined directions
x+=dirX[direction];
y+=dirY[direction];
}
//garbage collection; the memory allocated with 'new' should be freed to avoid memory leaks
delete currentNode;
while (!pq[index].empty()){
pq[index].pop();
}
return path;
//return path;
} else {
//add all possible neighbors to the openlist + define parents for later tracing back
//(four directions (int dir): up, down, left & right); but we want to make it
//as extendable as possible
for (int i=0; i<dir; i++){
//define new x & y coord for neighbor
//we do this because we want to preform some checks before making this neighbore node
int neighborX = currentNode->getxPos()+dirX[i];
int neighborY = currentNode->getyPos()+dirY[i];
//check boundaries
//ignore if on closed list (was already evaluted) or if unwalkable (currently not implemented)
if (!(neighborX <0 || neighborY <0 || neighborX > horizontalSize || neighborY > verticalSize ||
closedNodes[neighborX][neighborY]==1)){
//ok -> generate neighbor node
neighborNode = new node (neighborX,neighborY,currentNode->getDistance(),currentNode->getPriority());
//calculate the fscore of the node
neighborNode->updatePriority(xFinish,yFinish);
neighborNode->updateDistance();
//if neighbor not in openset => add it
if(openNodes[neighborX][neighborY]==0){
//add it to open set
openNodes[neighborX][neighborY]=neighborNode->getPriority();
//add it to the priority queue (by dereferencing our neighborNode object
//pq is of type node; push inserts a new element;
//the content is initialized as a copy
pq[index].push(*neighborNode);
//set the parent to the node we are currently looking at
dir_map[neighborX][neighborY]=(i+dir/2)%dir;
//if neighbor is already on open set
//check if path to that node is a better one (=lower gscore) if we use the current node to get there
} else if(openNodes[neighborX][neighborY]>neighborNode->getPriority()) {
/** lower gscore: change parent of the neighbore node to the select square
* recalculate fscore
* the value of the fscore should also be changed inside the node which resides inside our priority queue
* however as mentioned before this is a very slow operation (is going to be the bottleneck of this implemention probably)
* we will have to manuall scan for the right node and than change it.
*
* this check is very much needed, but the number of times this if condition is true is limited
**/
//update fscore inside the open list
openNodes[neighborX][neighborY]=neighborNode->getPriority();
//update the parent node
dir_map[neighborX][neighborY]=(i+dir/2)%dir;
//we copy the nodes from one queue to the other
//except the -old-current node will be ignored
while (!((pq[index].top().getxPos()==neighborX) && (pq[index].top().getyPos()==neighborY))){
pq[1-index].push(pq[index].top());
pq[index].pop();
}
pq[index].pop(); //remove the -old-current node
/** ?? **/
if(pq[index].size()>pq[1-index].size()){ //??? is this extra check necessary?
index=1-index; //index switch 1->0 or 0->1
}
while(!pq[index].empty()){
pq[1-index].push(pq[index].top());
pq[index].pop();
}
/** ?? **/index=1-index; //index switch 1->0 or 0->1
pq[index].push(*neighborNode); //and the -new-current node will be pushed in instead
} else delete neighborNode;
}
}
delete currentNode;
}
} return ""; //no path found
}
void pathFind::resetMaps(){
for (int y=0;y<horizontalSize;y++){
for (int x=0;x<verticalSize;x++){
closedNodes[x][y]=0;
openNodes[x][y]=0;
}
}
}
node.cpp
#include "node.h"#include <stdio.h>
#include <stdlib.h>
/** constructor **/
node::node(int x,int y, int d,int p)
{
xPos=x;
yPos=y;
distance=d;
priority=p;
}
/** getters for variables **/
//current node xPosition
int node::getxPos() const {
return xPos;
}
//current node yPosition
int node::getyPos() const {
return yPos;
}
//gscore
int node::getDistance() const {
return distance;
}
//fscore
int node::getPriority() const {
return priority;
}
/** Updates the priority; the lower the fscore the higer the priority
* the fscore is the sum of:
* -path-cost (gscore) (which is the distance from the starting node to the current node)
* -heuristic estimate (hscore) (which is an estimate of the distance from the current node to the destination node)
*
**/
void node::updatePriority(const int & xDest, const int & yDest){
priority = distance + estimateDistance(xDest,yDest)*10;
}
void node::updateDistance(){//const int & direction
distance +=10;
}/** Estimate function for the remaining distance to the goal
* here it's based on the Manhattan distance;
* which is the distance between two points in a grid based on a strictly horizontal & veritcal path;
* => sum of vertical & horizontal components
**/
const int & node::estimateDistance(const int & xDest, const int & yDest) const{
static int xDistance,yDistance,totalDistance;
xDistance=xDest-xPos;
yDistance=yDest-yPos;
totalDistance=abs(xDistance)+abs(yDistance);
return (totalDistance);
}
/** class functor (I think) to compare elements using:
* operator overloading: "<" gets overloaded which we are going to use in our priority queue
* to determine priority of a node in our queue;
* returns true if node a has a lower fscore compared to node b
*
* there is an ambiguity here: < -- >; better to make both >
* also prototype is now friend which could probably be replaced with this for the first
* argument; it advantage is that because of the friend function the operand order can be reversed
* this doesn't really looks to favor our application; so should I use it or not?
**/
bool operator<(const node & a, const node & b){
return a.getPriority() > b.getPriority();
}
Решение
Я думаю, что у вашего алгоритма нет проблем, и если нет доступных диагональных перемещений, не нужно будет это учитывать.
Манхэттенское расстояние — простая эвристика, и когда вы приближаетесь к узлу назначения, функция H дает меньшие числа, хотя функция G (расстояние от первого узла до здесь) становится больше. В результате многие узлы имеют одинаковую оценку f.
Другие решения
A * является полным обобщением — график, который вы даете, может иметь любую форму. Его волнует только то, можно ли перейти от X к Y, а не почему. Если диагональное движение не допускается, это не волнует. И это вполне нормально и законно для многих узлов иметь одинаковые f оценка — это, на самом деле, ожидается.
я думаю, что не имеет значения, сколько квадратов имеет одинаковое число очков Bcz, вы выбираете один из них. Как сказано в основном алгоритме A *, «в целях скорости может быть быстрее выбрать последний, который вы добавили в открытый список».
Я надеюсь, что это не будет проблемой, если не учитывать диагональные затраты. Кажется интересным, как это дает результаты.
Я надеюсь, что вы уже читали эту статью. Если нет, взгляните на это ясно.