Yaw, Pitch and roll to glm :: вращаться
Я пытаюсь понять это часами и просто не могу найти решение для этого: я пытаюсь добиться преобразования вектора ориентации в 3 glm::rotation звонки.
У меня есть цилиндр (0, 0, 0) с определенным радиусом и высотой. С помощью Leap Motion SDK я выполняю отслеживание инструмента, которое дает мне положение наконечника и вектор направления (который выражается как единичный вектор, указывающий в том же направлении, что и наконечник):
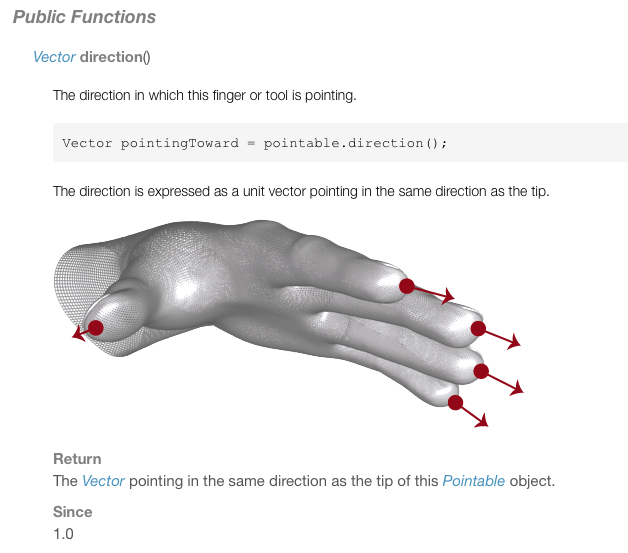
Источник: https://developer.leapmotion.com/documentation/skeletal/java/api/Leap.Pointable.html
Более того, yaw, pitch а также roll можно извлечь из этого вектора следующие функции SDK:
/// The yaw angle in radians.
///
/// Yaw is the angle between the negative z-axis and the projection of
/// the vector onto the x-z plane. In other words, yaw represents rotation
/// around the y-axis. If the vector points to the right of the negative z-axis,
/// then the returned angle is between 0 and pi radians (180 degrees);
/// if it points to the left, the angle is between 0 and -pi radians.
///
/// \image html images/Math_Yaw_Angle.png
///
/// @returns The angle of this vector to the right or left of the negative z-axis.
float yaw() const
{
return std::atan2(x, -z);
}
/// The pitch angle in radians.
///
/// Pitch is the angle between the negative z-axis and the projection of
/// the vector onto the y-z plane. In other words, pitch represents rotation
/// around the x-axis.
/// If the vector points upward, the returned angle is between 0 and pi radians
/// (180 degrees); if it points downward, the angle is between 0 and -pi radians.
///
/// \image html images/Math_Pitch_Angle.png
///
/// @returns The angle of this vector above or below the horizon (x-z plane).
float pitch() const {
return std::atan2(y, -z);
}
/// The roll angle in radians.
///
/// Roll is the angle between the negative y-axis and the projection of
/// the vector onto the x-y plane. In other words, roll represents rotation
/// around the z-axis. If the vector points to the left of the negative y-axis,
/// then the returned angle is between 0 and pi radians (180 degrees);
/// if it points to the right, the angle is between 0 and -pi radians.
///
/// \image html images/Math_Roll_Angle.png
///
/// Use this function to get roll angle of the plane to which this vector is a
/// normal. For example, if this vector represents the normal to the palm,
/// then this function returns the tilt or roll of the palm plane compared
/// to the horizontal (x-z) plane.
///
/// @returns The angle of this vector to the right or left of the y-axis.
float roll() const {
return std::atan2(x, -y);
}
В моем цикле рендеринга OpenGL я извлекаю положение кончика, а также вектор направления для каждого кадра. Я передаю матрицу модели как единую переменную моим шейдерам следующим образом:
cylinder->ResetModelMatrix(); // Set model matrix to identity
glm::vec3 translation = glm::vec3(toolTipPosition.x, toolTipPosition.y, toolTipPosition.z);
cylinder->TranslateModel(translation);
cylinderProgram->SetUniform("modelMatrix", cylinder->GetModelMatrix());
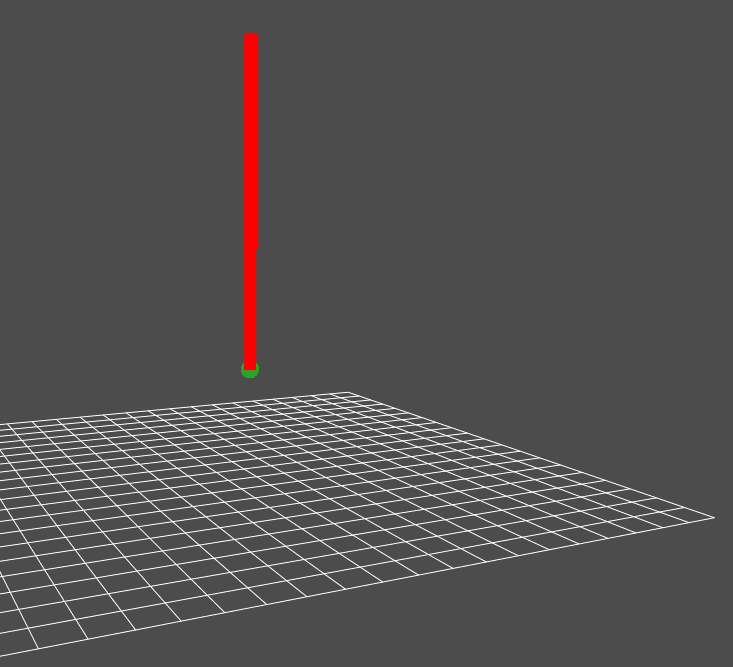
Только с переводом это работает хорошо и выглядит примерно так (цилиндр всегда направлен вверх):
Проблема возникает, когда я пытаюсь повернуть цилиндр в соответствии с ориентацией инструмента Прыжка.
У меня есть следующий код:
yaw = toolDirection.yaw() * Leap::RAD_TO_DEG;
// similarly for pitch and roll
cylinder->Rotate(yaw, glm::vec3(0.0f, 1.0f, 0.0f));
// pitch around (1, 0, 0) and roll around (0, 0, 1)
Однако я не получаю правильную ориентацию, и цилиндр «мерцает» и перепрыгивает между многими ориентациями, когда я пытаюсь применить это.
Важные функции преобразования находятся в интерфейсе, от которого наследуется мой класс цилиндров …
void Drawable::ResetModelMatrix()
{
this->modelMatrix = glm::mat4(1.0f);
}
void Drawable::TranslateModel(glm::vec3 translationVector)
{
this->modelMatrix = glm::translate(this->modelMatrix, translationVector);
}
void Drawable::RotateModel(float angle_in_degrees, glm::vec3 axisOfRotation)
{
this->modelMatrix = glm::rotate(this->modelMatrix, angle_in_degrees, axisOfRotation);
}
void Drawable::ScaleModel(glm::vec3 scalingVector)
{
this->modelMatrix = glm::scale(this->modelMatrix, scalingVector);
}
…с modelMatrix быть переменной-членом.
Я просканировал много похожих вопросов на тему ротации в OpenGL и вообще, но я не совсем уверен, в чем именно проблема с моим кодом.
Решение
Я предполагаю, что есть некоторое недопонимание того, что у нас есть и что мы хотим получить.
Дело в том, что вектор направления не однозначно определяет ориентацию тела в пространстве. Чтобы прояснить это утверждение, давайте подробнее рассмотрим, как можно представить повороты в трехмерном пространстве.
Повороты о происхождении имеют три степени свободы. Это означает, что вам нужно три независимых параметра, чтобы однозначно указать ориентацию тела. Ровно три, не больше, не меньше. Неважно, что они, поскольку ни один из них не может быть выражен в терминах других. Трехмерное вращение можно указать несколькими способами. Самые обычные методы:
- Эйлеровы углы. Три независимых параметра.
- Углы Тейта – Брайана (рыскание, тангаж и крен). Также три независимых параметра. Не путайте с углами Эйлера, они не совпадают!
- Ось-угол представления. Определяет поворот на единичный вектор и угол. Можно утверждать, что для этого случая есть четыре параметра. Однако это не так, потому что эти параметры не являются независимыми. Действительно, есть ограничение на длину единичного вектора. Или вы можете рассматривать это, поскольку длина вектора не влияет на вращение. Таким образом, опять же, есть три независимых параметра.
- Ориентация кватернионов. Так же, как и в предыдущем методе, четыре параметра, которые являются зависимыми. Как правило, кватернион ориентации можно рассматривать как способ кодирования осевого угла. Длина кватерниона не влияет на вращение, и обычно предполагается, что кватернион имеет единичную длину. Таким образом, у нас есть четыре параметра и одно ограничение, что означает, что у нас есть три независимых степени свободы.
Давайте ближе рассмотрим вашу проблему. У вас есть вектор направления, и вы хотите использовать его для определения ориентации цилиндра. По сути, у вас есть только два независимых параметра, потому что длина вектора направления не имеет значения (пусть это будет единичный вектор для простоты). Таким образом, вы не можете просто получить поворот от вектора направления, потому что будет один произвольный параметр.
Просто невозможно получить три неизвестных независимых параметра из входных данных, которые содержат только два независимых параметра. Существует необходимость в некоторых дополнительных ограничениях. Обычно это Up-вектор. Дополнительное ограничение преобразует три неизвестных независимых параметра в зависимые параметры.
Я бы посоветовал вам использовать GLM :: ориентирование функция, которая строит матрицу ориентации из ввода вектора направления и вектора повышения.
Что касается углов рыскания, тангажа и крена, которые вы получаете из указанных функций SDK. Эти функции не работают так, как вы пытаетесь их использовать. Вы должны указать восходящий вектор. Например, давайте рассмотрим, что вектор вверх — это направление оси y. Это означает, что угол крена всегда будет нулевым. Вы должны рассчитать угол рыскания, как вы делали это раньше. Так:
float yaw = std::atan2(x, -z);
Угол тангажа будет std :: atan2 (y, -z), но в повернутой рамке, а не в оригинале. Вы должны рассматривать угол наклона как арктангенс отношения длины проекции вектора направления на плоскость x-z и ее проекции на ось y. Я имею в виду:
float projectionLength = std::sqrt(x * x + z * z);
float pitch = std::atan2(y, projectionLength);
Когда вы строите матрицу преобразования, вы должны сначала применить вращение, соответствующее углу наклона, затем вращение, соответствующее повороту рыскания, а затем сдвиг.
Увидеть этот для получения дополнительной информации об углах Тейта – Брайана
Кроме того, вы должны знать о том, что вращения не являются коммутативными. Это означает, что вы должны выполнять вращения в строгой последовательности. Существует шесть возможностей выбора осей вращения для углов Тейта – Брайана, которые называются соглашениями. Эти условные обозначения зависят от осей, вокруг которых осуществляется вращение.
Другие решения