Виртуальная PTZ-камера через физическую камеру «рыбий глаз» и Open CV
Я пытаюсь реализовать виртуальную камеру Pan-Tilt-Zoom (PTZ), основанную на данных физической камеры «рыбий глаз» (угол обзора 180 градусов).
По моему мнению, я должен понять следующую последовательность.
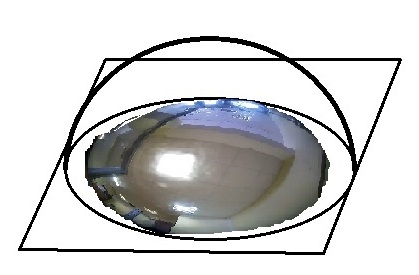
- Получить координаты центра круга «рыбий глаз» в координатах матрицы датчика «рыбий глаз».
- Получить радиус круга рыбий глаз в той же системе координат.
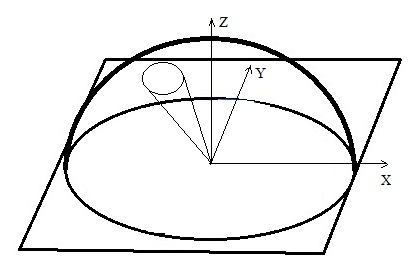
- Создайте уравнение сферы, которое имеет тот же центр и радиус, что и плоское «рыбий глаз» на плоском сенсоре камеры.
- Спроецируйте все цветные точки от плоского изображения до верхней полусферы.
- Выберите углы в плоскости X Y и плоскости X Z, чтобы описать направление обзора виртуального PTZ.
- Выберите угол обзора и отметьте его кружком вокруг виртуального вектора обзора PTZ, который будет рисоваться на поверхности полусферы.
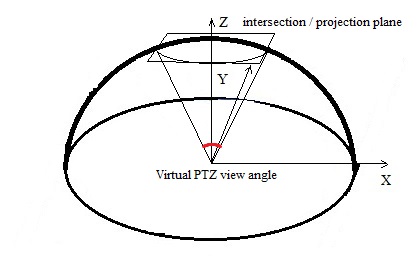
- Сгенерируйте уравнение плоскости, пересечение которого с полушарием будет кругом вокруг направления обзора.
- Переместите все цветные точки из круга в плоскость круга вокруг направления обзора, используя направление от края полушария к центру полушария для проекции.
- Нарисуйте все неокрашенные точки внутри круга проекции, используя интерполяцию (реализовано в cv :: remap).
На мой взгляд, самый важный шаг — поднять цветные точки от плоского изображения до трехмерного полушария.
Мой вопрос:
Будет ли правильным просто установить Z-координату для всех цветных точек плоского изображения в соответствии с уравнением полушария, чтобы поднять точки от плоскости изображения к поверхности полушария?



Решение
Задача ещё не решена.
Другие решения
Других решений пока нет …