В real_time_pose_esvaluation нет ошибок, но не удается обнаружить объект
Я работаю над оценкой позы в реальном времени, и вы можете найти код здесь
https://github.com/opencv/opencv/tree/master/samples/cpp/tutorial_code/calib3d/real_time_pose_estimation (примеры приведены в opencv 3.1.0).
Он имеет два этапа:
-
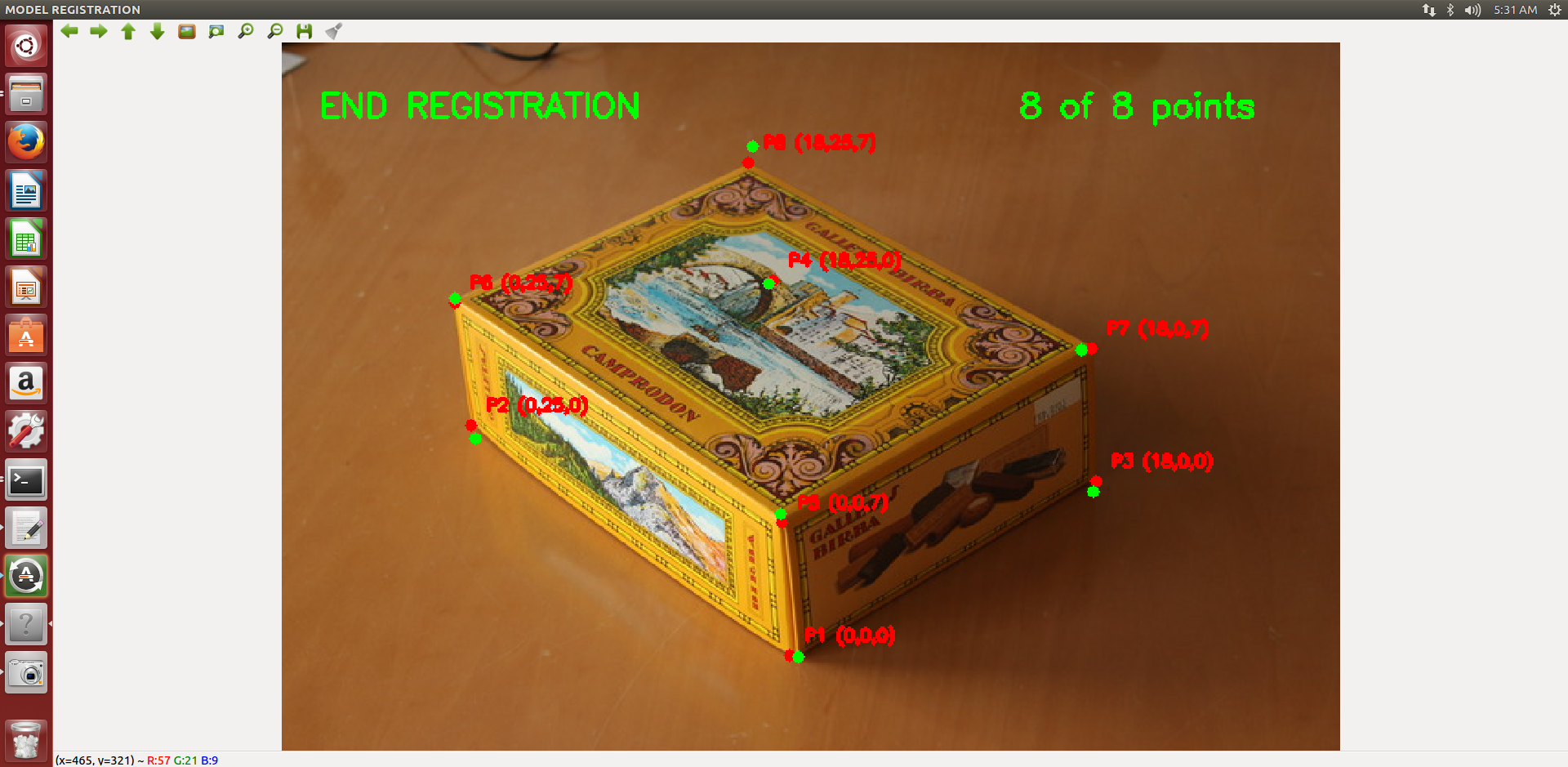
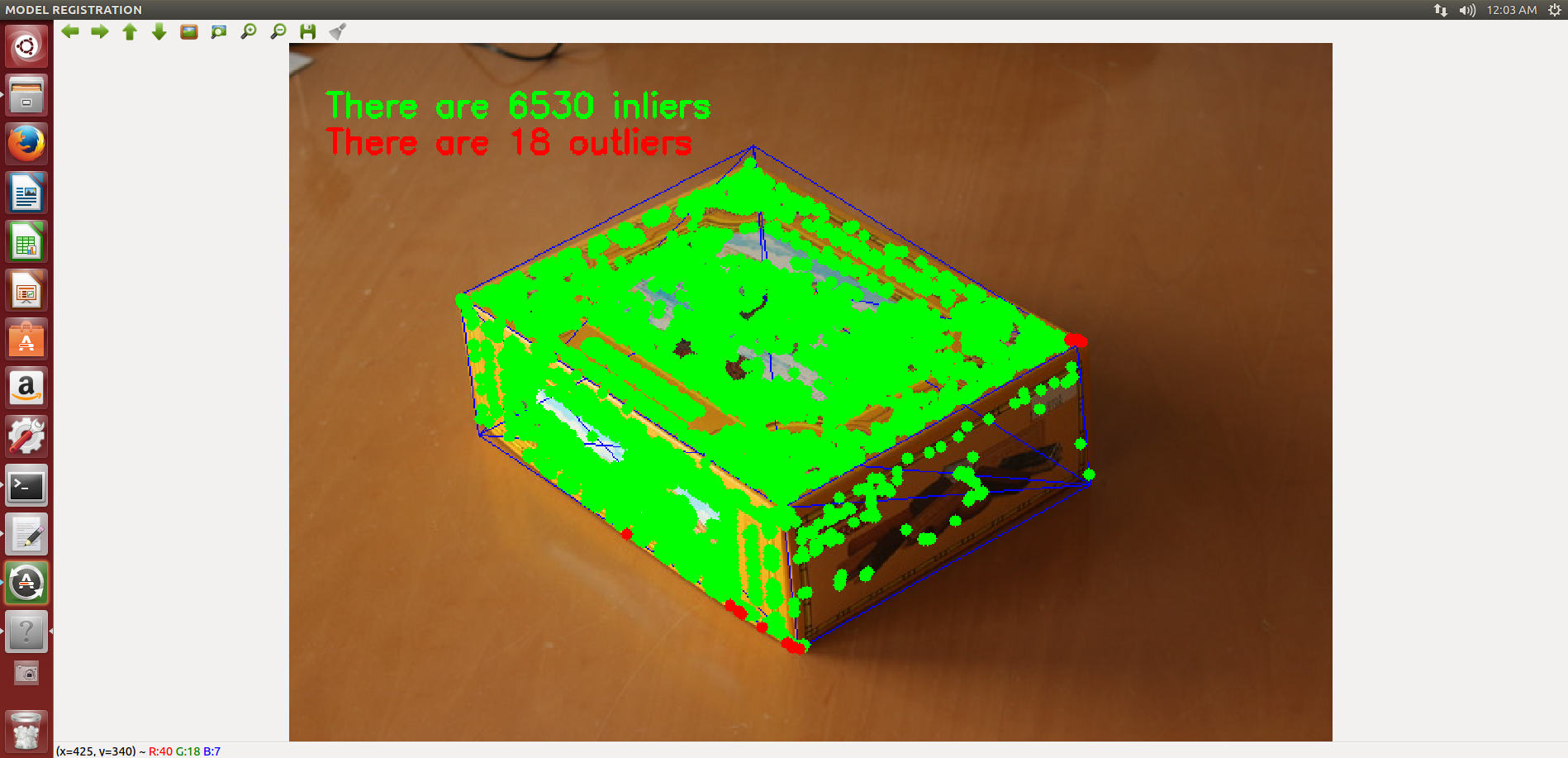
регистрация модели (регистрация трехмерной текстурированной модели обнаруживаемого объекта в файле .yml)
-
обнаружение модели
-
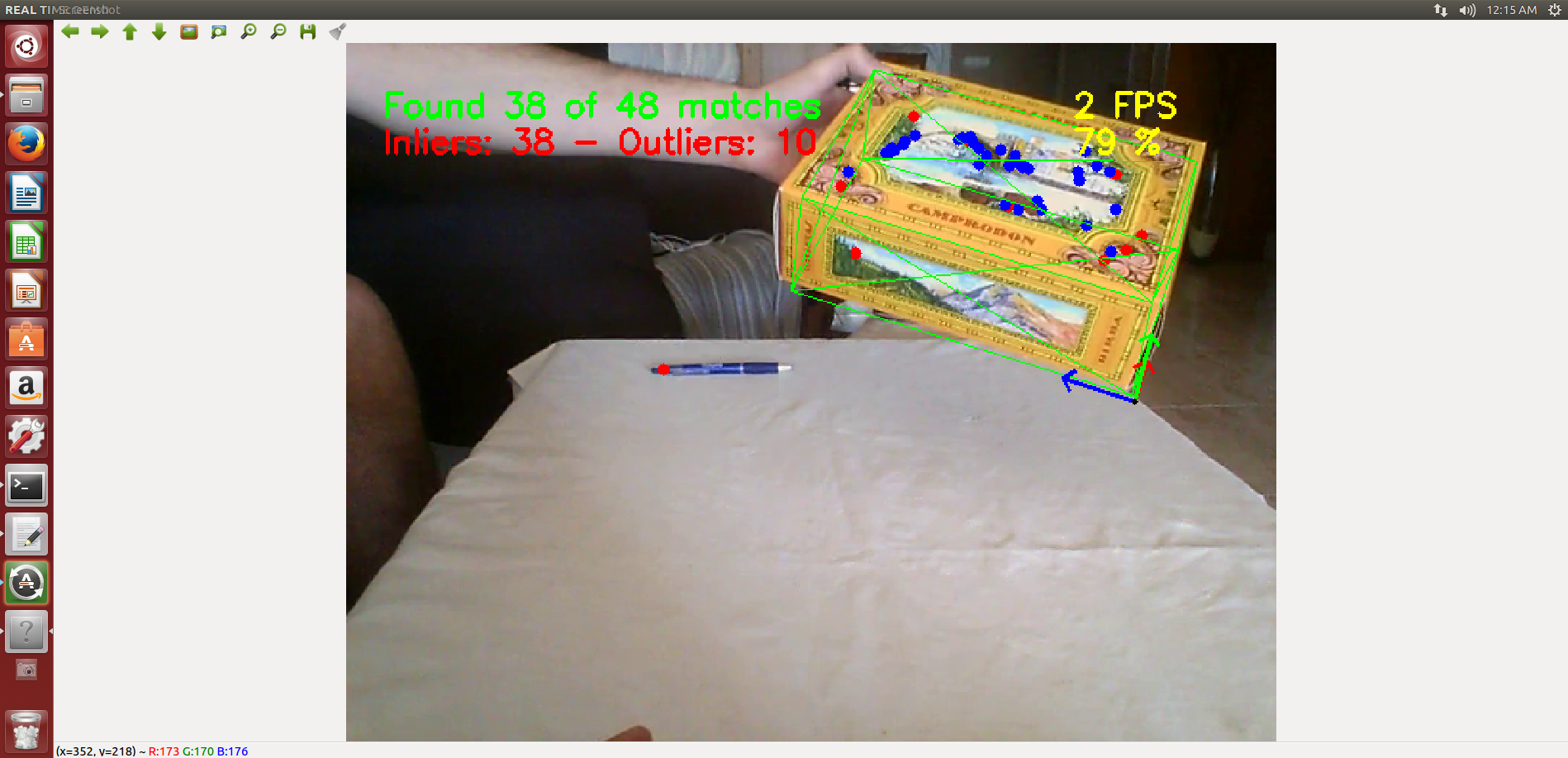
если я отправлю файл .yml (cookies_ORB.yml), который уже находится в / real_time_pose_esvaluation / Data, тогда обнаружение будет успешным, как и ожидалось
-
почему не обнаруживается, если я вручную регистрирую трехмерную текстурированную модель объекта в файле .yml и заканчивается неожиданным выводом.
-
Вот что я делаю:
ошибка 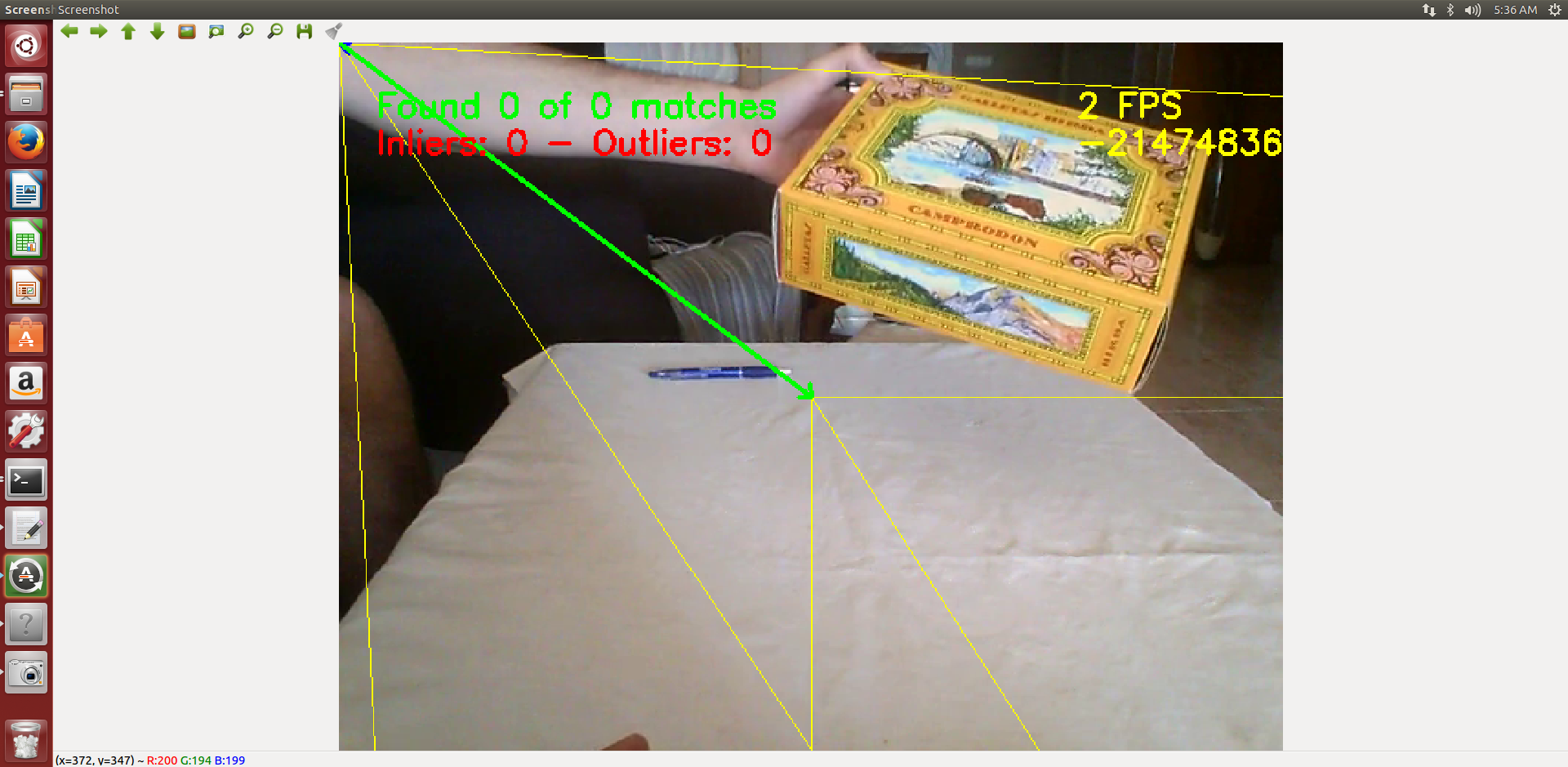
ожидаемый результат-
Решение
Задача ещё не решена.
Другие решения
Других решений пока нет …