Странная карта ориентации с использованием sobel. В чем дело?
Я пытался следовать этому методу рисования карты ориентации http://answers.opencv.org/question/9493/fingerprint-orientation-map-through-gradient/
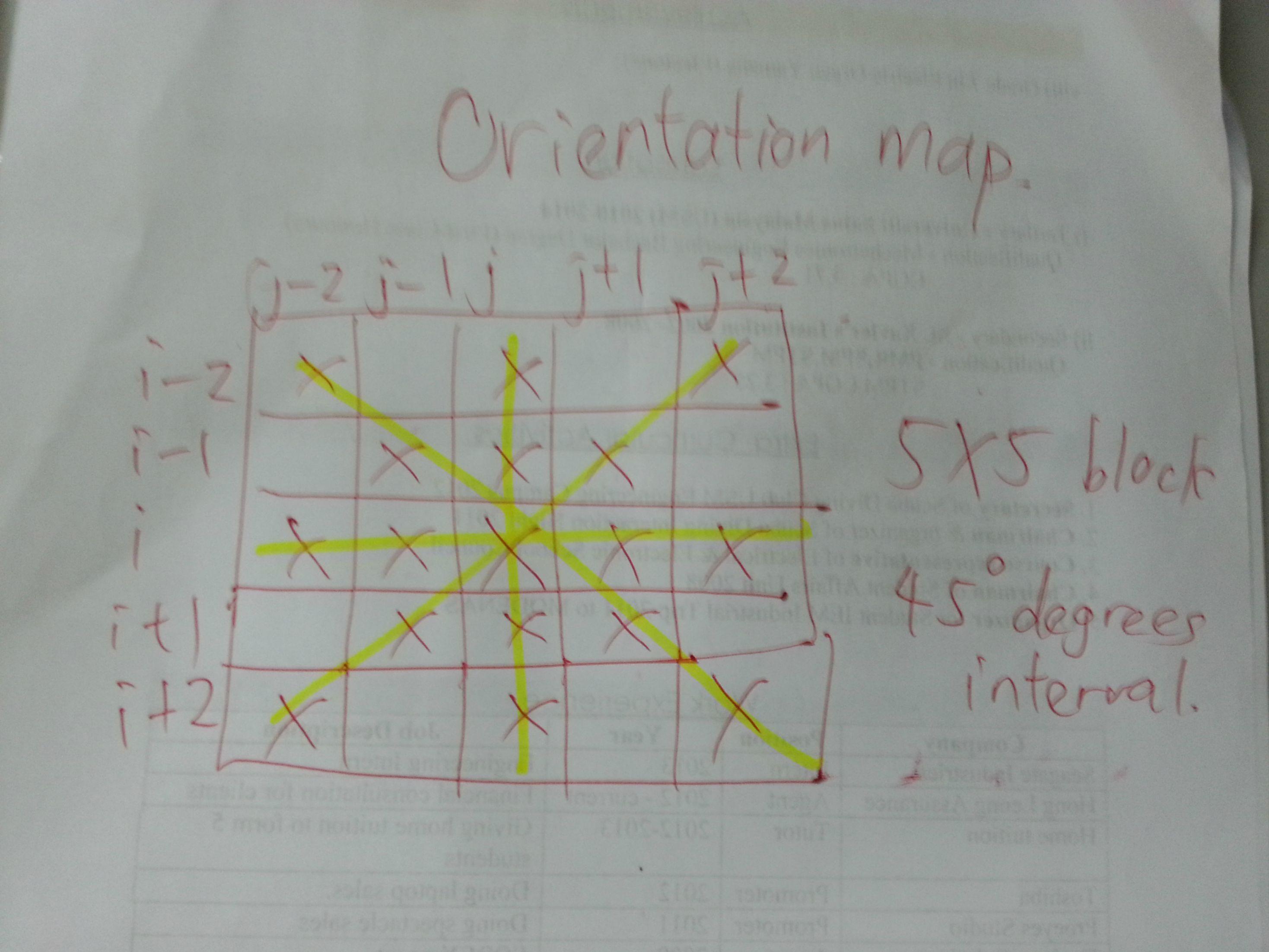
И я использовал размер блока 5×5 на моем изображении 480×320. Градиенты, которые я получил, были от 0 до 270 градусов. И есть постоянные значения, которые продолжают повторяться, как 44,7623 и 224,762. Интересно, неправильны ли мои градиенты.
После этого я добавляю все градиенты в блок 5×5 и делю их на 25 (усреднение), как сказано в ссылке. Я разделил градусы на 8 секций с интервалами в 45 градусов и составил их график. Но это не похоже на мое оригинальное изображение. Может кто-нибудь сказать мне, что не так? Я просто хочу определить основную (кругообразную) особенность изображения.
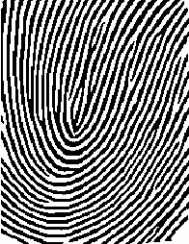
Мое оригинальное изображение это _________________________________________________ Но моя карта ориентации это:

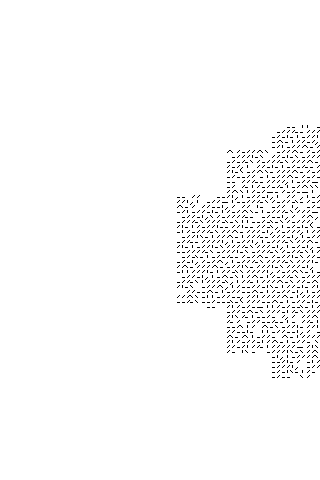
Это то что я делаю
В чем дело ? знак равно
Я получил градиенты от этого метода:
/// Gradient X
cv::Sobel(original_Mat, grad_x, CV_32FC1, 1, 0, 3);
/// Gradient Y
cv::Sobel(original_Mat, grad_y, CV_32FC1, 0, 1, 3);
Mat orientation = Mat(grad_x.rows, grad_y.cols, CV_32F);
for(int i = 0; i < grad_x.rows; i++){
for(int j = 0; j < grad_x.cols; j++){
// Retrieve a single value
float valueX = grad_x.at<float>(i,j);
float valueY = grad_x.at<float>(i,j);
// Calculate the corresponding single direction, done by applying the arctangens function
float result = fastAtan2(valueX,valueY);
// Store in orientation matrix element
orientation.at<float>(i,j) = result;
}
}
Вот полный код.
int main()
{
cv::Mat original_Mat=cv::imread("Source.bmp", 1);
cv::Mat grad = cv::Mat::zeros(original_Mat.size(),CV_64F);
/// Generate grad_x and grad_y
cv::Mat grad_x = cv::Mat::zeros(original_Mat.size(), CV_64F);
cv::Mat grad_y = cv::Mat::zeros(original_Mat.size(), CV_64F);
cv::Mat grad_angle = cv::Mat::zeros(original_Mat.size(), CV_64F);
/// Gradient X
cv::Sobel(original_Mat, grad_x, CV_32FC1, 1, 0, 3);
/// Gradient Y
cv::Sobel(original_Mat, grad_y, CV_32FC1, 0, 1, 3);
Mat orientation = Mat(grad_x.rows, grad_y.cols, CV_32F); //to store the gradients
Mat img=Mat(grad_x.rows, grad_y.cols, CV_32F);//to draw out the map
img = cv::Scalar(255,255,255);//all white
// Calculate orientations of gradients --> in degrees
// Loop over all matrix values and calculate the accompanied orientation
for(int i = 0; i < grad_x.rows; i++){
for(int j = 0; j < grad_x.cols; j++){
// Retrieve a single value
float valueX = grad_x.at<float>(i,j);
float valueY = grad_x.at<float>(i,j);
// Calculate the corresponding single direction, done by applying the arctangens function
float result = fastAtan2(valueX,valueY);
// Store in orientation matrix element
orientation.at<float>(i,j) = result;
}
}int i=0,j=0;
int x1=0,x2=0;
float results;
for(int l=0;l<96;l++) //to loop all the rows
{
int x1=(5+(l*5)); // to get 5x5 block sizes
for(int k=0;k<64;k++)//to loop all the columns
{
int x2=(5+(k*5)); // to get 5x5 block sizes
results=0;//to get the total of 5x5 gradient values
for(i=(x1-5); i < x1; i++){
for(j=(x2-5); j < x2; j++){
results=results+orientation.at<float>(i,j);
orientation.at<float>(i,j)=0;}
}
results=results/25; //averaging the 5x5 block gradients
orientation.at<float>((x1-3),(x2-3))=results; //to store the results in the center of the 5x5 block
}
}
results=0;//this loop is to draw out the orientation map
for(int i=0;i<480;i++)
{
for(int j=0;j<320;j++)
{
results=orientation.at<float>(i,j);
if ((results<=22.5)&&(results>0)){
results=0;
img.at<int>(i,j)=255;
img.at<int>(i,j+1)=255;
img.at<int>(i,j+2)=255;
}
else if((results>22.5)&&(results<=67.5)){
results=45;
img.at<int>(i,j)=255;
img.at<int>(i-1,j+1)=255;
img.at<int>(i-2,j+2)=255;}
else if((results>67.5)&&(results<=112.5)){
results=90;
img.at<int>(i,j)=255;
img.at<int>(i-1,j)=255;
img.at<int>(i-2,j)=255;
}
else if((results>112.5)&&(results<=157.5)){
results=135;
img.at<int>(i,j)=255;
img.at<int>(i-1,j-1)=255;
img.at<int>(i-2,j-2)=255;
}
else if((results>157.5)&&(results<=202.5)){
results=180;
img.at<int>(i,j)=255;
img.at<int>(i,j-1)=255;
img.at<int>(i,j-2)=255;
}
else if((results>202.5)&&(results<=247.5)){
results=225;
img.at<int>(i,j)=255;
img.at<int>(i+1,j-1)=255;
img.at<int>(i+2,j-2)=255;
endx=x2-5;
endy=x1-1;
}
else if((results>247.5)&&(results<=292.5)){
results=270;
img.at<int>(i,j)=255;
img.at<int>(i+1,j)=255;
img.at<int>(i+2,j)=255;
}
else if((results>292.5)&&(results<=337.5)){
results=315;
img.at<int>(i,j)=255;
img.at<int>(i+1,j+1)=255;
img.at<int>(i+2,j+2)=255;
}
else
{
results=0;
}
orientation.at<float>(i,j)=results;}
}
Решение
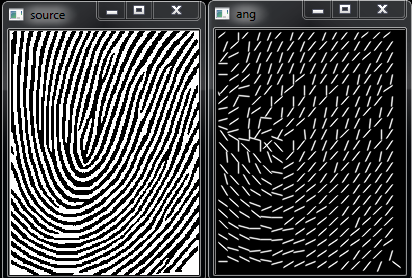
Вот мой результат:
Для изображения:
У меня есть результат:
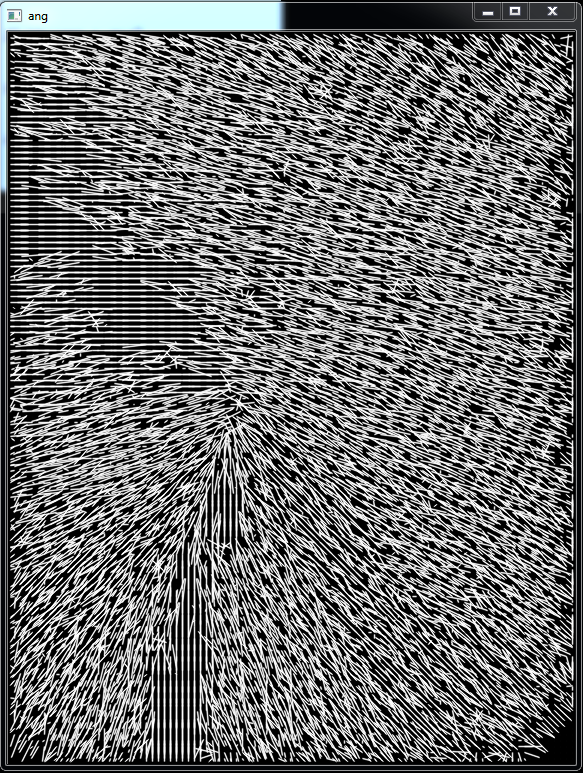
Код:
#include <stdio.h>
#include <stdarg.h>
#include "opencv2/opencv.hpp"using namespace std;
using namespace cv;
int main(int argc, char* argv[])
{
namedWindow("source");
namedWindow("result");
namedWindow("ang");
Mat img=imread("D:\\ImagesForTest\\binarized_image.png",0);
cv::threshold(img,img,128,255,cv::THRESH_BINARY);
Mat thinned;
thinned=img.clone(); // Just clone the input
//Thinning(img,thinned); // Not actually needed
cv::GaussianBlur(thinned,thinned,Size(3,3),1.0);
Mat gx,gy,ang,mag;
cv::Sobel(thinned,gx,CV_32FC1,1,0);
cv::Sobel(thinned,gy,CV_32FC1,0,1);
cv::phase(gx,gy,ang,false);
cv::magnitude(gx,gy,mag);
cv::normalize(mag,mag,0,1,cv::NORM_MINMAX);Mat angRes=Mat::zeros(img.rows*3,img.cols*3,CV_8UC1);
for (int i=0;i< img.rows;i+=2)
{
for (int j=0;j< img.cols;j+=2)
{
int x=j*3;
int y=i*3;
float r=5;
float m=r*(mag.at<float>(i,j));
float dx=m*r*cos(ang.at<float>(i,j));
float dy=m*r*sin(ang.at<float>(i,j));
cv::line(angRes,cv::Point(x,y),cv::Point(x+dx,y+dy),Scalar::all(255),1,CV_AA);
}
}
imshow("ang",angRes);
imshow("source",img);
imshow("result",thinned);
cv::waitKey(0);
}
Другой вариант (средневзвешенные значения блока):
#include <stdio.h>
#include <stdarg.h>
#include "opencv2/opencv.hpp"using namespace std;
using namespace cv;
float GetWeightedAngle(Mat& mag,Mat& ang)
{
float res=0;
float n=0;
for (int i=0;i< mag.rows;++i)
{
for (int j=0;j< mag.cols;++j)
{
res+=ang.at<float>(i,j)*mag.at<float>(i,j);
n+=mag.at<float>(i,j);
}
}
res/=n;
return res;
}int main(int argc, char* argv[])
{
namedWindow("source");
namedWindow("ang");
Mat img=imread("D:\\ImagesForTest\\binarized_image.png",0);
cv::threshold(img,img,128,255,cv::THRESH_BINARY);
Mat thinned;
thinned=img.clone();
//Thinning(img,thinned);
//cv::GaussianBlur(thinned,thinned,Size(3,3),1.0);
Mat gx,gy,ang,mag;
cv::Sobel(thinned,gx,CV_32FC1,1,0,7);
cv::Sobel(thinned,gy,CV_32FC1,0,1,7);
cv::phase(gx,gy,ang,false);
cv::magnitude(gx,gy,mag);
cv::normalize(mag,mag,0,1,cv::NORM_MINMAX);Mat angRes=Mat::zeros(img.rows,img.cols,CV_8UC1);
int blockSize=img.cols/15-1;
float r=blockSize;
for (int i=0;i< img.rows-blockSize;i+= blockSize)
{
for (int j=0;j< img.cols-blockSize;j+= blockSize)
{
float a=GetWeightedAngle(mag(Rect(j,i,blockSize,blockSize)),ang(Rect(j,i,blockSize,blockSize)));
float dx=r*cos(a);
float dy=r*sin(a);
int x=j;
int y=i;
cv::line(angRes,cv::Point(x,y),cv::Point(x+dx,y+dy),Scalar::all(255),1,CV_AA);
}
}
imshow("ang",angRes);
imshow("source",img);
cv::waitKey(0);
}
Это дает результат изображения:
Другие решения
Других решений пока нет …