Слишком много ограничивающих рамок и кругов после алгоритма водораздела
У меня проблемы с поиском ограничивающих рамок и кругов после использования водораздела. я использовал Opencv 2 Computer Vision Руководство по программированию приложений Книга для алгоритма водораздела и opencv.org пример создания ограничивающих рамок и кругов.
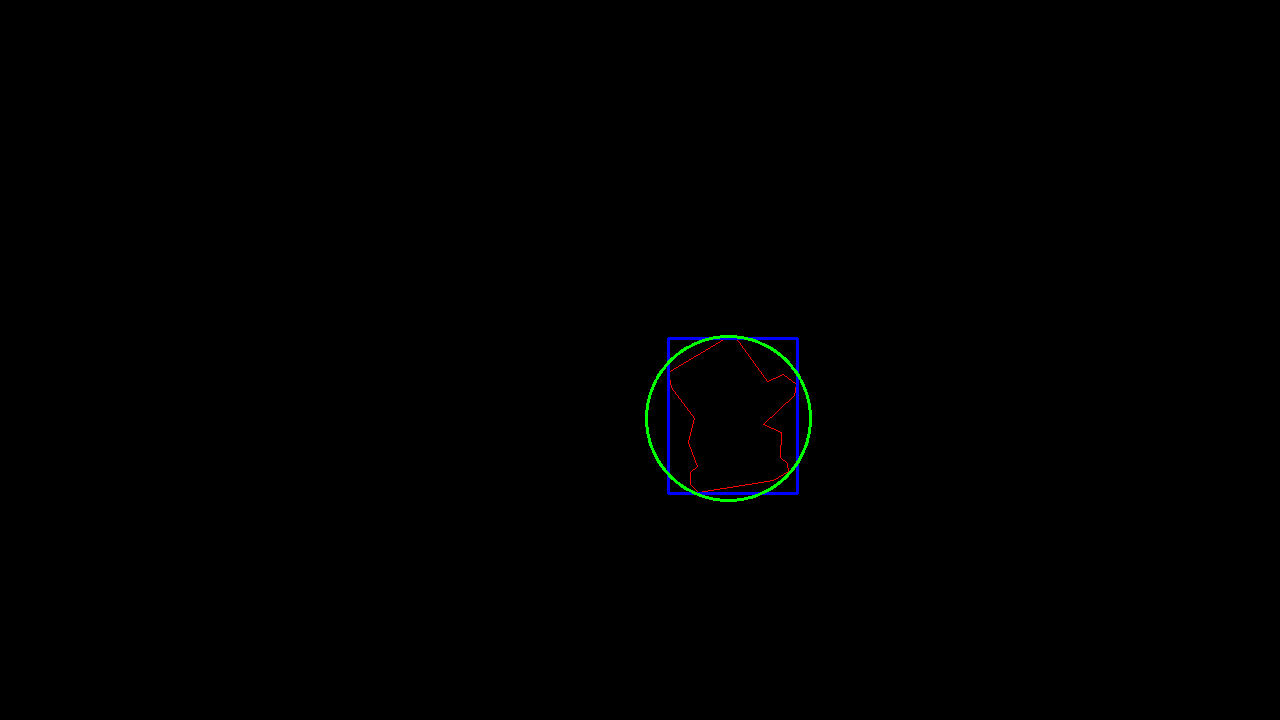
Моя проблема в том, что я получаю слишком много коробок и кружков для своего объекта. Кроме того, почему это добавляет границу к изображению?
Я использую OpenCV 2.4.11 и Visual Studio Express 2013.
Это мой код:
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include "header.h"
using namespace cv;
using namespace std;
int main()
{
// Read Input Image
Mat src = imread("toy.png");
// Convert the input image to gray-scale
Mat src_gray;
cvtColor(src, src_gray, CV_BGR2GRAY);
// Threshold the gray-input image
Mat src_thresh;
threshold(src_gray, src_thresh, 100, 255, CV_THRESH_BINARY | CV_THRESH_OTSU);
// Detect the foreground.
Mat fg;
erode(src_thresh, fg, Mat(), Point(-1, -1), 6);
// Detect the background
Mat bg;
dilate(src_thresh, bg, Mat(), Point(-1, -1), 6);
threshold(bg, bg, 1, 128, THRESH_BINARY_INV);
// Get the markers
Mat markers(src_thresh.size(), CV_8U, Scalar(0));
markers = fg + bg;
// Create watershed segmentation object
WatershedSegmenter segmenter;
// Set markers and process
segmenter.setMarkers(markers);
segmenter.process(src);
// Get segmentation result
Mat seg = segmenter.getSegmentation();
// Get watersheds
Mat ws = segmenter.getWatersheds();
// Display the result
imshow("Watershed", ws);
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
/// Find contours
findContours(ws, contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE, Point(0, 0));
/// Approximate contours to polygons + get bounding rects and circles
vector<vector<Point> > contours_poly(contours.size());
vector<Rect> boundRect(contours.size());
vector<Point2f>center(contours.size());
vector<float>radius(contours.size());
for (int i = 0; i < contours.size(); i++)
{
approxPolyDP(Mat(contours[i]), contours_poly[i], 3, true);
boundRect[i] = boundingRect(Mat(contours_poly[i]));
minEnclosingCircle((Mat)contours_poly[i], center[i], radius[i]);
}/// Draw polygonal contour + bonding rects + circles
Mat drawing = Mat::zeros(ws.size(), CV_8UC3);
for (int i = 0; i< contours.size(); i++)
{
drawContours(drawing, contours_poly, i, Scalar(0, 0, 255), 1, 8, vector<Vec4i>(), 0, Point());
rectangle(drawing, boundRect[i].tl(), boundRect[i].br(), Scalar(255, 0, 0), 2, 8, 0);
circle(drawing, center[i], (int)radius[i], Scalar(0, 255, 0), 2, 8, 0);
}
/// Show in a window
imshow("Contours", drawing);
waitKey();
return 0;
}
Это файл header.h:
#if !defined WATERSHS
#define WATERSHS
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
class WatershedSegmenter {
private:
cv::Mat markers;
public:
void setMarkers(const cv::Mat& markerImage) {
// Convert to image of ints
markerImage.convertTo(markers, CV_32S);
}
cv::Mat process(const cv::Mat &image) {
// Apply watershed
cv::watershed(image, markers);
return markers;
}
// Return result in the form of an image
cv::Mat getSegmentation() {
cv::Mat tmp;
// all segment with label higher than 255
// will be assigned value 255
markers.convertTo(tmp, CV_8U);
return tmp;
}
// Return watershed in the form of an image
cv::Mat getWatersheds() {
cv::Mat tmp;
markers.convertTo(tmp, CV_8U, 255, 255);
return tmp;
}
};#endif
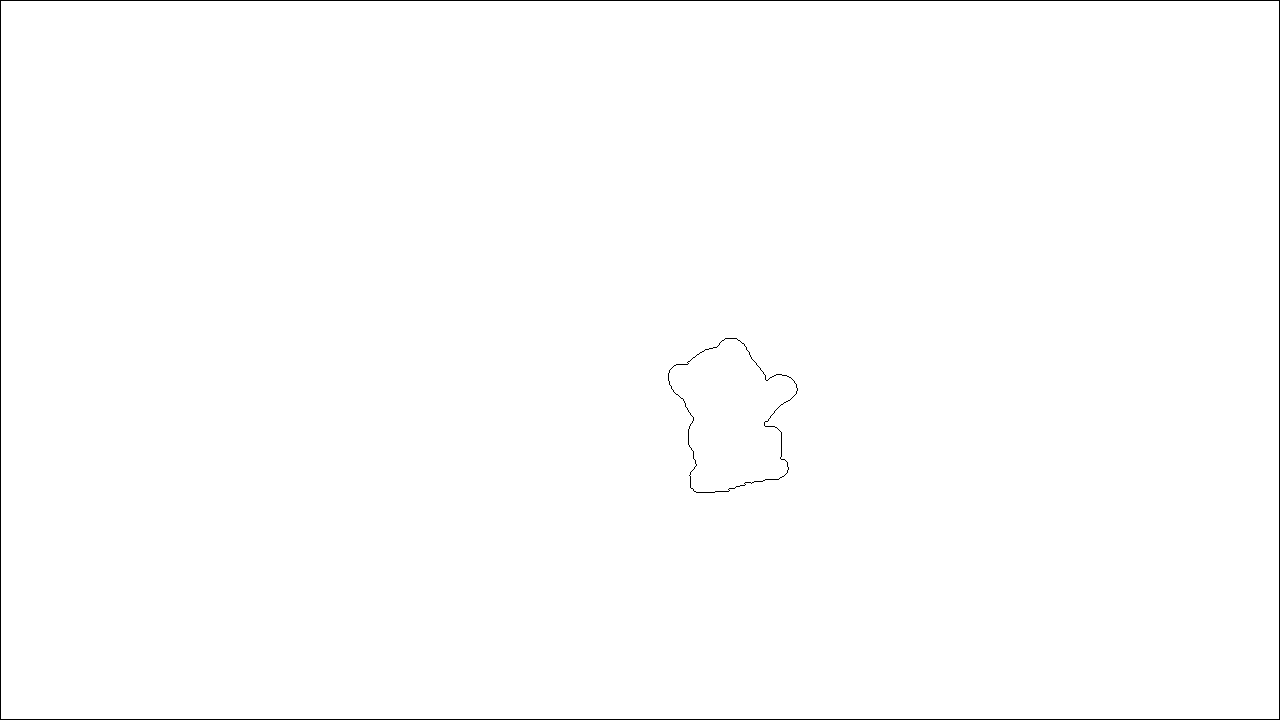
toy.png:

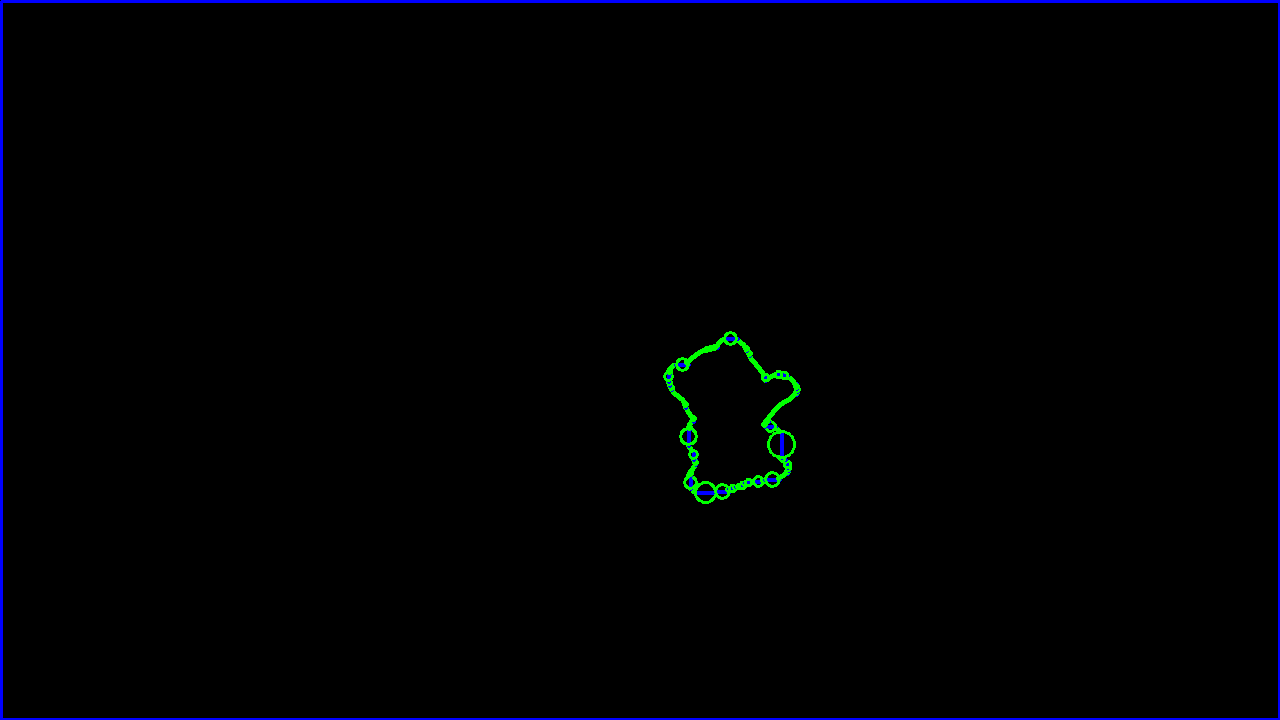
watershed.png:
contours.png:
Спасибо.
Решение
Проблема в том, что вы переходите к findContour двоичное изображение, где края (передний план) установлены в 0, а остальное (фон) установлено на 255,
findContours вместо этого ожидает, что передний план >0и фон 0, Так что вам нужно инвертировать двоичное изображение, которое вы передаете findContour, лайк:
/// Find contours
Mat ws_negate = ~ws;
findContours(ws_negate, contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE, Point(0, 0));
В результате изображение будет:
Другие решения
Других решений пока нет …