Шевеления для экстракции краев OpenCV
Я ищу предложения по улучшению моего алгоритма для поиска деталей на следующем изображении

пока у меня есть следующее
GaussianBlur(canny, canny, Size(5, 5), 2, 2);
Canny(canny, canny, 100, 200, 5);
HoughCircles(canny, Part_Centroids, CV_HOUGH_GRADIENT, 2, 30, 100, 50, 50, 60);
Мой вывод обнаружения края выглядит следующим образом
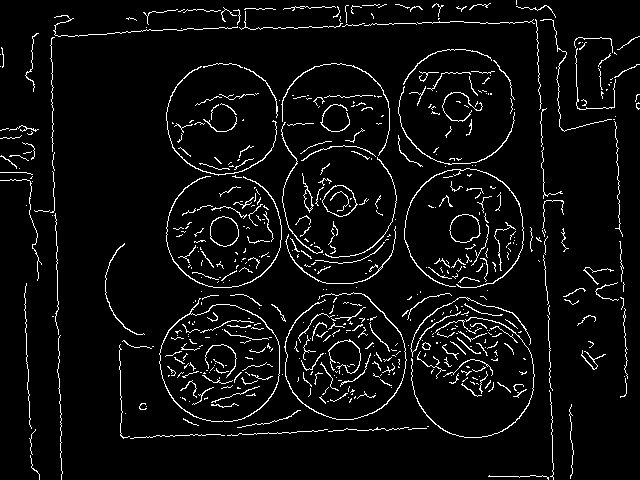
и я использую HoughCircle, чтобы попытаться найти части. Я не имел большого успеха, хотя, потому что HoughCircle кажется очень суетливым и часто возвращает круг, который действительно не лучший матч для части.
Любые предложения по улучшению этого алгоритма поиска
РЕДАКТИРОВАТЬ:
Я попробовал предложения в комментариях ниже. Нормализация внесла некоторые улучшения, но удаление хитрости до того, как крутые круги изменили необходимые настройки, но не стабильность.
Теперь я думаю, что мне нужно сделать что-то вроде крутых кругов с очень открытыми порогами, а затем найти способ оценить результаты. Существуют ли хорошие методы для оценки результатов крутого круга или соотнесения результатов с хитрым выводом для процента совпадения
Решение
Я думал, что опубликую свое решение, потому что кто-то может найти мои уроки ценными.
Я начал с того, что взял несколько кадров и усреднил их. Это решило некоторые проблемы с шумом, которые у меня были, при сохранении сильных краев. Затем я сделал базовый фильтр и хитрый край, чтобы извлечь приличную карту краев.
Scalar cannyThreshold = mean(filter);
// Canny Edge Detection
Canny(filter, canny, cannyThreshold[0]*(2/3), cannyThreshold[0]*(1+(1/3)), 3);
Затем я использую взаимную корреляцию с увеличением диаметральных шаблонов и сохраняю совпадения, которые превышают порог
// Iterate through diameter ranges
for (int r = 40; r < 70; r++)
{
Mat _mask, _template(Size((r * 2) + 4, (r * 2) + 4), CV_8U);
_template = Scalar(0, 0, 0);
_mask = _template.clone();
_mask = Scalar(0, 0, 0);
circle(_template, Point(r + 4, r + 4), r, Scalar(255, 255, 255), 2, CV_AA);
circle(_template, Point(r + 4, r + 4), r / 3.592, Scalar(255, 255, 255), 2, CV_AA);
circle(_mask, Point(r + 4, r + 4), r + 4, Scalar(255, 255, 255), -1);
Mat res_32f(canny.rows, canny.cols, CV_32FC1);
matchTemplate(canny, _template, res_32f, CV_TM_CCORR_NORMED, _mask);
Mat resize(canny.rows, canny.cols, CV_32FC1);
resize = Scalar(0, 0, 0);
res_32f.copyTo(resize(Rect((resize.cols - res_32f.cols) / 2, (resize.rows - res_32f.rows) / 2, res_32f.cols, res_32f.rows)));
// Strore Well Scoring Results
double minVal, maxVal;
double threshold = .25;
do
{
Point minLoc, maxLoc;
minMaxLoc(resize, &minVal, &maxVal, &minLoc, &maxLoc);
if (maxVal > threshold)
{
matches.push_back(CircleScore(maxLoc.x, maxLoc.y, r, maxVal,1));
circle(resize, maxLoc, 30, Scalar(0, 0, 0), -1);
}
} while (maxVal > threshold);
}
Я отфильтрую круги для лучшего матча в каждой зоне
// Sort Matches For Best Match
for (size_t i = 0; i < matches.size(); i++)
{
size_t j = i + 1;
while (j < matches.size())
{
if (norm(Point2f(matches[i].X, matches[i].Y) - Point2f(matches[j].X, matches[j].Y)) - abs(matches[i].Radius - matches[j].Radius) < 15)
{
if (matches[j].Score > matches[i].Score)
{
matches[i] = matches[j];
}
matches[j] = matches[matches.size() - 1];
matches.pop_back();
j = i + 1;
}
else j++;
}
}
Следующим был хитрый. Я хотел посмотреть, какая часть, вероятно, будет на вершине. Я сделал это, исследуя каждый набор деталей, которые ближе, чем сумма их радиусов, а затем проверял, являются ли ребра в зоне перекрытия более подходящими для одного над другим. Любой покрытый круг должен иметь небольшие сильные края в зоне перекрытия.
// Layer Sort On Intersection
for (size_t i = 0; i < matches.size(); i++)
{
size_t j = i + 1;
while (j < matches.size())
{
double distance = norm(Point2f(matches[i].X, matches[i].Y) - Point2f(matches[j].X, matches[j].Y));
// Potential Overlapping Part
if (distance < ((matches[i].Radius+matches[j].Radius) - 10))
{
int score_i = 0, score_j = 0;
Mat intersect_a(canny.rows, canny.cols, CV_8UC1);
Mat intersect_b(canny.rows, canny.cols, CV_8UC1);
intersect_a = Scalar(0, 0, 0);
intersect_b = Scalar(0, 0, 0);
circle(intersect_a, Point(cvRound(matches[i].X), cvRound(matches[i].Y)), cvRound(matches[i].Radius) +4, Scalar(255, 255, 255), -1);
circle(intersect_a, Point(cvRound(matches[i].X), cvRound(matches[i].Y)), cvRound(matches[i].Radius / 3.592-4), Scalar(0, 0, 0), -1);
circle(intersect_b, Point(cvRound(matches[j].X), cvRound(matches[j].Y)), cvRound(matches[j].Radius) + 4, Scalar(255, 255, 255), -1);
circle(intersect_b, Point(cvRound(matches[j].X), cvRound(matches[j].Y)), cvRound(matches[j].Radius / 3.592-4), Scalar(0, 0, 0), -1);
bitwise_and(intersect_a, intersect_b, intersect_a);
double a, h;
a = (matches[i].Radius*matches[i].Radius - matches[j].Radius*matches[j].Radius + distance*distance) / (2 * distance);
h = sqrt(matches[i].Radius*matches[i].Radius - a*a);
Point2f p0((matches[j].X - matches[i].X)*(a / distance) + matches[i].X, (matches[j].Y - matches[i].Y)*(a / distance) + matches[i].Y);
circle(intersect_a, Point2f(p0.x + h*(matches[j].Y - matches[i].Y) / distance, p0.y - h*(matches[j].X - matches[i].X) / distance), 6, Scalar(0, 0, 0), -1);
circle(intersect_a, Point2f(p0.x - h*(matches[j].Y - matches[i].Y) / distance, p0.y + h*(matches[j].X - matches[i].X) / distance), 6, Scalar(0, 0, 0), -1);
bitwise_and(intersect_a, canny, intersect_a);
intersect_b = Scalar(0, 0, 0);
circle(intersect_b, Point(cvRound(matches[i].X), cvRound(matches[i].Y)), cvRound(matches[i].Radius), Scalar(255, 255, 255), 6);
bitwise_and(intersect_a, intersect_b, intersect_b);
score_i = countNonZero(intersect_b);
intersect_b = Scalar(0, 0, 0);
circle(intersect_b, Point(cvRound(matches[j].X), cvRound(matches[j].Y)), cvRound(matches[j].Radius), Scalar(255, 255, 255), 6);
bitwise_and(intersect_a, intersect_b, intersect_b);
score_j = countNonZero(intersect_b);
if (score_i < score_j)matches[i].Layer = matches[j].Layer + 1;
if (score_j < score_i)matches[j].Layer = matches[i].Layer + 1;
}
j++;
}
}
После этого было легко извлечь лучшую часть, чтобы выбрать (я также коррелирую с данными о глубине
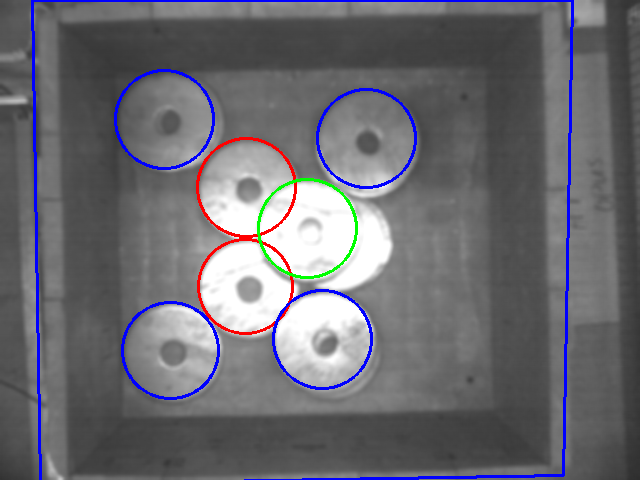
Синие круги — это части, зеленый круг — самая высокая стопка, а красные круги — это части, которые находятся под другими частями.
Я надеюсь, что это может помочь кому-то еще, работающему над подобными проблемами
Другие решения
Других решений пока нет …