SACSegmentation обнаружение нечетной модели самолета
Я пытаюсь подогнать модель самолета к облаку точек (с плоскостной структурой).
Проблема, с которой я сталкиваюсь, заключается в том, что подобранная плоскость представляет собой небольшой кусочек облака, даже если для порога расстояния установлено относительно большое значение.
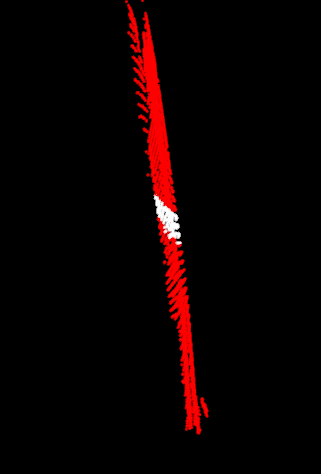
Вот некоторые изображения результата: (белые точки — это модели)
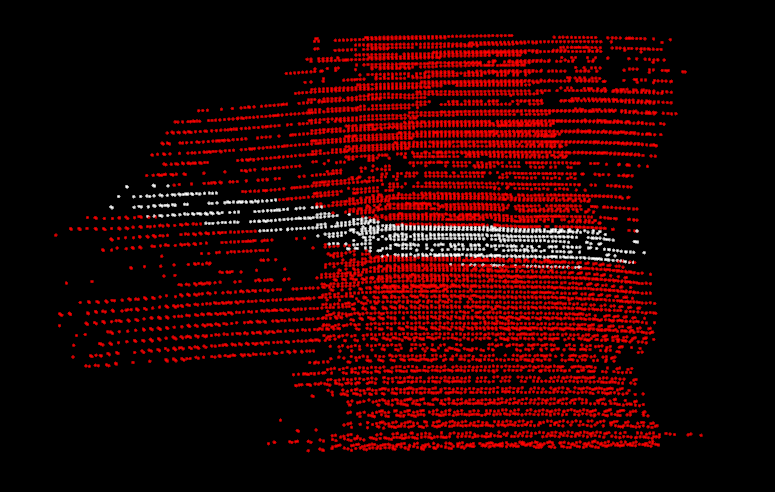
Вы можете увидеть, насколько тонкое облако здесь:
Я настроил всевозможные параметры для объекта SACSegmentation и даже попробовал несколько методов RANSAC, которые PCL использовал без удачи.
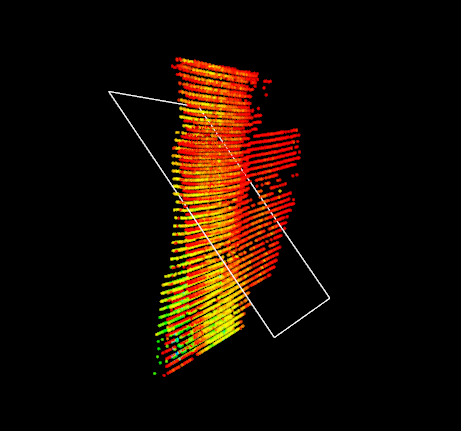
Это облако точек отображается:
https://drive.google.com/file/d/0B0PUIShwQuU7RmFKUW1Cd2V1Zk0/view?usp=sharing
Вот минимальный код, который следует за учебником довольно близко:
#include <iostream>
#include <pcl/ModelCoefficients.h>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/segmentation/sac_segmentation.h>int
main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZI>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZI>);
pcl::io::loadPCDFile<pcl::PointXYZI>("test.pcd", *cloud); //* load the file
pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients);
pcl::PointIndices::Ptr inliers(new pcl::PointIndices);
// Create the segmentation object
pcl::SACSegmentation<pcl::PointXYZI> seg;
// Optional
seg.setOptimizeCoefficients(true);
// Mandatory
seg.setModelType(pcl::SACMODEL_PLANE);
seg.setMethodType(pcl::SAC_RANSAC);
seg.setDistanceThreshold(0.025);
seg.setInputCloud(cloud);
seg.segment(*inliers, *coefficients);
if (inliers->indices.size() == 0)
{
PCL_ERROR("Could not estimate a planar model for the given dataset.");
return (-1);
}
std::cerr << "Model coefficients: " << coefficients->values[0] << " "<< coefficients->values[1] << " "<< coefficients->values[2] << " "<< coefficients->values[3] << std::endl;
//add points to plane that fit plane model
pcl::PointCloud<pcl::PointXYZI>::Ptr output(new pcl::PointCloud<pcl::PointXYZI>);
for (size_t i = 0; i < inliers->indices.size(); ++i)
{
output->push_back(cloud->points[inliers->indices[i]]);
}
displaySubcloud(cloud, output);
displayPlane(cloud, coefficients, "plane");
return (0);
}
Решение
Я нашел решение, но я не знаю, почему оно это исправляет. Перемещая облако ближе к началу координат, оно может определить правильную модель самолета.
Другие решения
Других решений пока нет …