расстояние от заданной точки до заданного эллипса
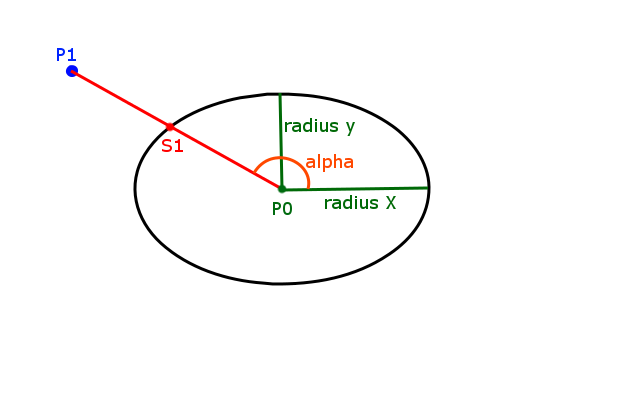
У меня есть эллипс, определяемый центральной точкой, радиусом X и радиусом Y, и у меня есть точка. Я хочу найти точку на эллипсе, которая является ближайшей к данной точке. На рисунке ниже это будет S1.
Теперь у меня уже есть код, но где-то в нем есть логическая ошибка, и я, похоже, не могу его найти. Я разбил проблему до следующего примера кода:
#include <vector>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <math.h>
using namespace std;
void dostuff();
int main()
{
dostuff();
return 0;
}
typedef std::vector<cv::Point> vectorOfCvPoints;
void dostuff()
{
const double ellipseCenterX = 250;
const double ellipseCenterY = 250;
const double ellipseRadiusX = 150;
const double ellipseRadiusY = 100;
vectorOfCvPoints datapoints;
for (int i = 0; i < 360; i+=5)
{
double angle = i / 180.0 * CV_PI;
double x = ellipseRadiusX * cos(angle);
double y = ellipseRadiusY * sin(angle);
x *= 1.4;
y *= 1.4;
x += ellipseCenterX;
y += ellipseCenterY;
datapoints.push_back(cv::Point(x,y));
}
cv::Mat drawing = cv::Mat::zeros( 500, 500, CV_8UC1 );
for (int i = 0; i < datapoints.size(); i++)
{
const cv::Point & curPoint = datapoints[i];
const double curPointX = curPoint.x;
const double curPointY = curPoint.y * -1; //transform from image coordinates to geometric coordinates
double angleToEllipseCenter = atan2(curPointY - ellipseCenterY * -1, curPointX - ellipseCenterX); //ellipseCenterY * -1 for transformation to geometric coords (from image coords)
double nearestEllipseX = ellipseCenterX + ellipseRadiusX * cos(angleToEllipseCenter);
double nearestEllipseY = ellipseCenterY * -1 + ellipseRadiusY * sin(angleToEllipseCenter); //ellipseCenterY * -1 for transformation to geometric coords (from image coords)cv::Point center(ellipseCenterX, ellipseCenterY);
cv::Size axes(ellipseRadiusX, ellipseRadiusY);
cv::ellipse(drawing, center, axes, 0, 0, 360, cv::Scalar(255));
cv::line(drawing, curPoint, cv::Point(nearestEllipseX,nearestEllipseY*-1), cv::Scalar(180));
}
cv::namedWindow( "ellipse", CV_WINDOW_AUTOSIZE );
cv::imshow( "ellipse", drawing );
cv::waitKey(0);
}
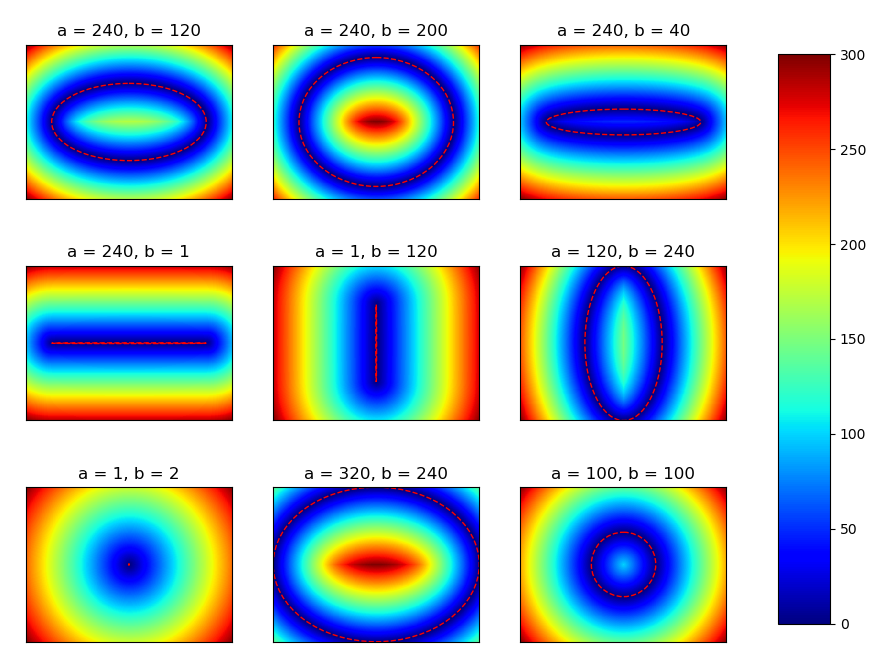
Создает следующее изображение:
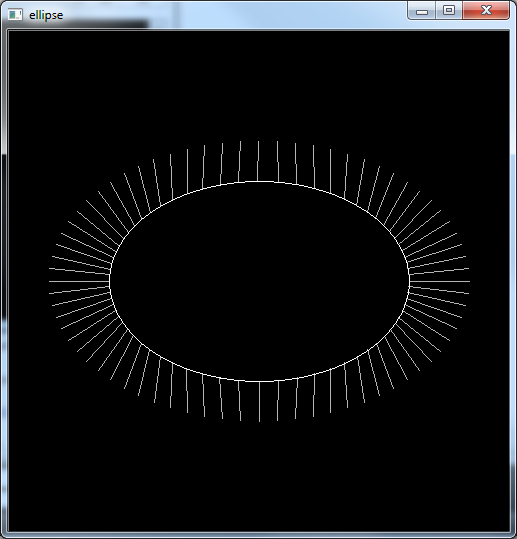
Вы можете видеть, что он на самом деле находит «близкие» точки на эллипсе, но это не «ближайшие» точки. То, что я намеренно хочу, это: (извините, мой плохой рисунок)
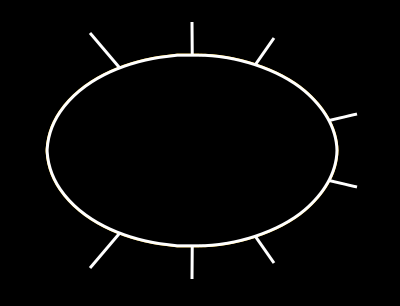
Вы бы расширили линии на последнем изображении, они пересекут центр эллипса, но это не относится к линиям на предыдущем изображении.
Я надеюсь, что вы получите картину. Может кто-нибудь сказать мне, что я делаю не так?
Решение
Рассмотрим ограничивающий круг вокруг заданной точки (c, d), который проходит через ближайшую точку на эллипсе. Из диаграммы видно, что ближайшая точка такова, что линия, проведенная от нее до данной точки, должна быть перпендикулярна общей касательной эллипса и окружности. Любые другие точки будут находиться за пределами круга и должны находиться дальше от заданной точки.
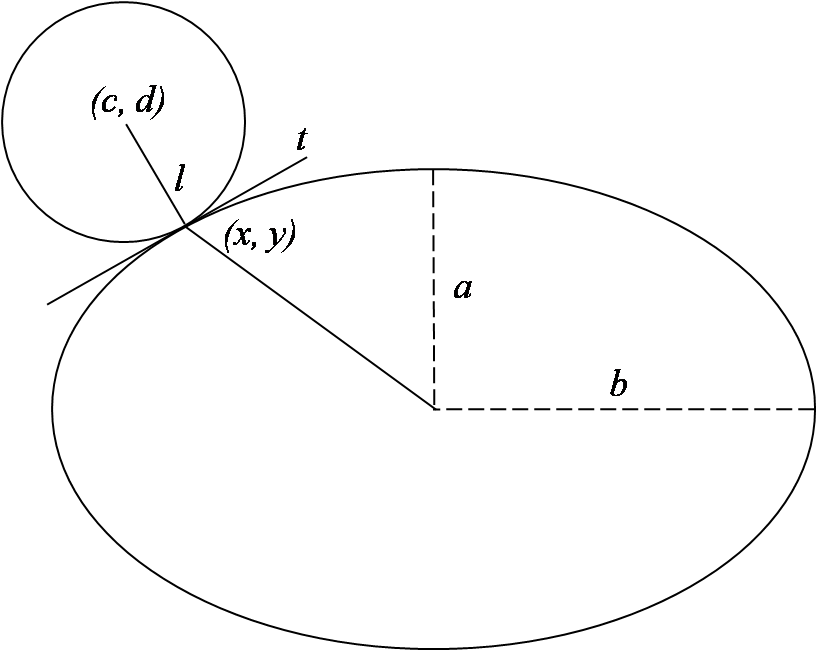
Итак, вы ищете не пересечение между линией и эллипсом, но точка (x, y) на диаграмме.
Градиент тангенса:

Градиент линии:

Условие для перпендикулярных линий — произведение градиентов = -1:


Когда переставлен и подставлен в уравнение вашего эллипса …

…это даст два неприятных квартичных уравнения (полинома 4-й степени) в терминах x или y. AFAIK нет генеральный аналитические (точные алгебраические) методы их решения. Вы можете попробовать итерационный метод — найти алгоритм итерационного поиска корня Ньютона-Рафсона.
Взгляните на эту очень хорошую статью на эту тему:
http://www.spaceroots.org/documents/distance/distance-to-ellipse.pdf
Извините за неполный ответ — я полностью обвиняю законы математики и природы …
РЕДАКТИРОВАТЬ: ой, у меня, кажется, есть а и б неправильный путь на диаграмме XD
Другие решения
Вот код, переведенный на C #, реализованный из этой статьи для решения для эллипса:
http://www.geometrictools.com/Documentation/DistancePointEllipseEllipsoid.pdf
Обратите внимание, что этот код не проверен — если вы обнаружите какие-либо ошибки, дайте мне знать.
//Pseudocode for robustly computing the closest ellipse point and distance to a query point. It
//is required that e0 >= e1 > 0, y0 >= 0, and y1 >= 0.
//e0,e1 = ellipse dimension 0 and 1, where 0 is greater and both are positive.
//y0,y1 = initial point on ellipse axis (center of ellipse is 0,0)
//x0,x1 = intersection point
double GetRoot ( double r0 , double z0 , double z1 , double g )
{
double n0 = r0*z0;
double s0 = z1 - 1;
double s1 = ( g < 0 ? 0 : Math.Sqrt(n0*n0+z1*z1) - 1 ) ;
double s = 0;
for ( int i = 0; i < maxIter; ++i ){
s = ( s0 + s1 ) / 2 ;
if ( s == s0 || s == s1 ) {break; }
double ratio0 = n0 /( s + r0 );
double ratio1 = z1 /( s + 1 );
g = ratio0*ratio0 + ratio1*ratio1 - 1 ;
if (g > 0) {s0 = s;} else if (g < 0) {s1 = s ;} else {break ;}
}
return s;
}
double DistancePointEllipse( double e0 , double e1 , double y0 , double y1 , out double x0 , out double x1)
{
double distance;
if ( y1 > 0){
if ( y0 > 0){
double z0 = y0 / e0;
double z1 = y1 / e1;
double g = z0*z0+z1*z1 - 1;
if ( g != 0){
double r0 = (e0/e1)*(e0/e1);
double sbar = GetRoot(r0 , z0 , z1 , g);
x0 = r0 * y0 /( sbar + r0 );
x1 = y1 /( sbar + 1 );
distance = Math.Sqrt( (x0-y0)*(x0-y0) + (x1-y1)*(x1-y1) );
}else{
x0 = y0;
x1 = y1;
distance = 0;
}
}
else // y0 == 0
x0 = 0 ; x1 = e1 ; distance = Math.Abs( y1 - e1 );
}else{ // y1 == 0
double numer0 = e0*y0 , denom0 = e0*e0 - e1*e1;
if ( numer0 < denom0 ){
double xde0 = numer0/denom0;
x0 = e0*xde0 ; x1 = e1*Math.Sqrt(1 - xde0*xde0 );
distance = Math.Sqrt( (x0-y0)*(x0-y0) + x1*x1 );
}else{
x0 = e0;
x1 = 0;
distance = Math.Abs( y0 - e0 );
}
}
return distance;
}
Существует относительно простой численный метод с лучшей сходимостью, чем метод Ньютона. У меня есть запись в блоге о том, почему это работает http://wet-robots.ghost.io/simple-method-for-distance-to-ellipse/
Эта реализация работает без каких-либо триггерных функций:
def solve(semi_major, semi_minor, p):
px = abs(p[0])
py = abs(p[1])
tx = 0.707
ty = 0.707
a = semi_major
b = semi_minor
for x in range(0, 3):
x = a * tx
y = b * ty
ex = (a*a - b*b) * tx**3 / a
ey = (b*b - a*a) * ty**3 / b
rx = x - ex
ry = y - ey
qx = px - ex
qy = py - ey
r = math.hypot(ry, rx)
q = math.hypot(qy, qx)
tx = min(1, max(0, (qx * r / q + ex) / a))
ty = min(1, max(0, (qy * r / q + ey) / b))
t = math.hypot(ty, tx)
tx /= t
ty /= t
return (math.copysign(a * tx, p[0]), math.copysign(b * ty, p[1]))
Кредит для Адриан Стивенс для Оптимизация без триггеров.
Следующий код Python реализует уравнения, описанные вРасстояние от точки до эллипса«и использует метод Ньютона, чтобы найти корни и от этого ближайшую точку на эллипсе к точке.
К сожалению, как видно из примера, он кажется точным только вне эллипса. Внутри эллипса происходят странные вещи.
from math import sin, cos, atan2, pi, fabsdef ellipe_tan_dot(rx, ry, px, py, theta):
'''Dot product of the equation of the line formed by the point
with another point on the ellipse's boundary and the tangent of the ellipse
at that point on the boundary.
'''
return ((rx ** 2 - ry ** 2) * cos(theta) * sin(theta) -
px * rx * sin(theta) + py * ry * cos(theta))def ellipe_tan_dot_derivative(rx, ry, px, py, theta):
'''The derivative of ellipe_tan_dot.
'''
return ((rx ** 2 - ry ** 2) * (cos(theta) ** 2 - sin(theta) ** 2) -
px * rx * cos(theta) - py * ry * sin(theta))def estimate_distance(x, y, rx, ry, x0=0, y0=0, angle=0, error=1e-5):
'''Given a point (x, y), and an ellipse with major - minor axis (rx, ry),
its center at (x0, y0), and with a counter clockwise rotation of
`angle` degrees, will return the distance between the ellipse and the
closest point on the ellipses boundary.
'''
x -= x0
y -= y0
if angle:
# rotate the points onto an ellipse whose rx, and ry lay on the x, y
# axis
angle = -pi / 180. * angle
x, y = x * cos(angle) - y * sin(angle), x * sin(angle) + y * cos(angle)
theta = atan2(rx * y, ry * x)
while fabs(ellipe_tan_dot(rx, ry, x, y, theta)) > error:
theta -= ellipe_tan_dot(
rx, ry, x, y, theta) / \
ellipe_tan_dot_derivative(rx, ry, x, y, theta)
px, py = rx * cos(theta), ry * sin(theta)
return ((x - px) ** 2 + (y - py) ** 2) ** .5
Вот пример:
rx, ry = 12, 35 # major, minor ellipse axis
x0 = y0 = 50 # center point of the ellipse
angle = 45 # ellipse's rotation counter clockwise
sx, sy = s = 100, 100 # size of the canvas background
dist = np.zeros(s)
for x in range(sx):
for y in range(sy):
dist[x, y] = estimate_distance(x, y, rx, ry, x0, y0, angle)
plt.imshow(dist.T, extent=(0, sx, 0, sy), origin="lower")
plt.colorbar()
ax = plt.gca()
ellipse = Ellipse(xy=(x0, y0), width=2 * rx, height=2 * ry, angle=angle,
edgecolor='r', fc='None', linestyle='dashed')
ax.add_patch(ellipse)
plt.show()
Который генерирует 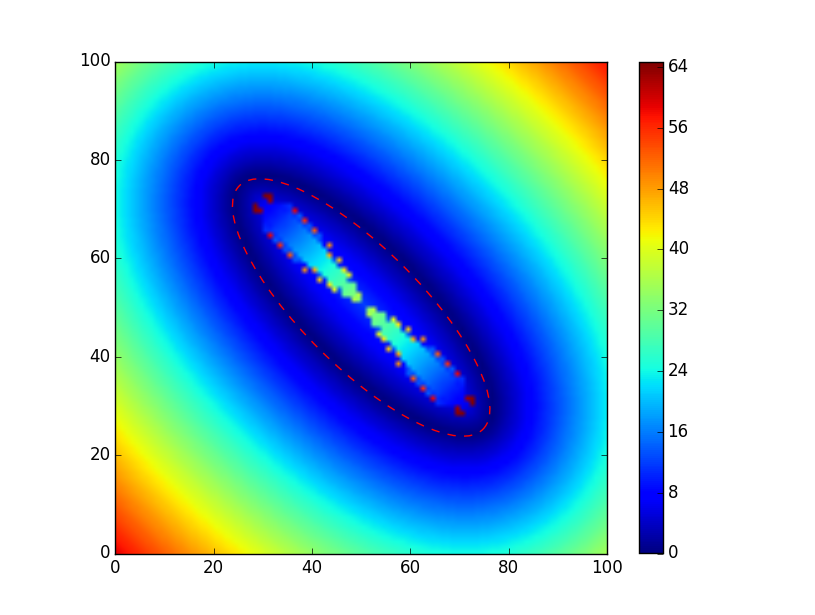 эллипс и расстояние от границы эллипса как тепловая карта. Как видно, на границе расстояние равно нулю (темно-синий).
эллипс и расстояние от границы эллипса как тепловая карта. Как видно, на границе расстояние равно нулю (темно-синий).
Вам просто нужно рассчитать пересечение линии [P1,P0] к вашему эллипсу, который S1,
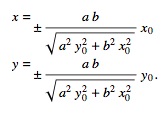
Если уравнение линии:

и эклипсия элипса это:

чем значения S1 будет:
Теперь вам просто нужно рассчитать расстояние между S1 в P1 , формула (для A,B баллы) это:

Учитывая эллипс Е в параметрической форме и точка п

квадрат расстояния между п а также Е (т) является

Минимум должен удовлетворять

Использование тригонометрических тождеств

и заменяя

дает следующее квартическое уравнение:

Вот пример функции C, которая решает квартику напрямую и вычисляет грех (т) а также Стоимость) для ближайшей точки на эллипсе:
void nearest(double a, double b, double x, double y, double *ecos_ret, double *esin_ret) {
double ax = fabs(a*x);
double by = fabs(b*y);
double r = b*b - a*a;
double c, d;
int switched = 0;
if (ax <= by) {
if (by == 0) {
if (r >= 0) { *ecos_ret = 1; *esin_ret = 0; }
else { *ecos_ret = 0; *esin_ret = 1; }
return;
}
c = (ax - r) / by;
d = (ax + r) / by;
} else {
c = (by + r) / ax;
d = (by - r) / ax;
switched = 1;
}
double cc = c*c;
double D0 = 12*(c*d + 1); // *-4
double D1 = 54*(d*d - cc); // *4
double D = D1*D1 + D0*D0*D0; // *16
double St;
if (D < 0) {
double t = sqrt(-D0); // *2
double phi = acos(D1 / (t*t*t));
St = 2*t*cos((1.0/3)*phi); // *2
} else {
double Q = cbrt(D1 + sqrt(D)); // *2
St = Q - D0 / Q; // *2
}
double p = 3*cc; // *-2
double SS = (1.0/3)*(p + St); // *4
double S = sqrt(SS); // *2
double q = 2*cc*c + 4*d; // *2
double l = sqrt(p - SS + q / S) - S - c; // *2
double ll = l*l; // *4
double ll4 = ll + 4; // *4
double esin = (4*l) / ll4;
double ecos = (4 - ll) / ll4;
if (switched) {
double t = esin;
esin = ecos;
ecos = t;
}
*ecos_ret = copysign(ecos, a*x);
*esin_ret = copysign(esin, b*y);
}