Расчет преобразования узла FBX
Недавно, пытаясь использовать FBX SDK для импорта 3d-модели, созданной с помощью 3dmax, я почти сразу столкнулся с проблемами трансформации. Очень простая сетка (сфера, разделенная на две половины), состоящая из двух узлов, имеет смещение одного из своих узлов, несмотря ни на что. Я попробовал несколько (весьма неоднозначных) способов вычисления преобразования, которые предоставляет последняя документация SDK … Но результат тот же. Я предоставлю код и сетку на случай, если кто-нибудь сможет указать на любые ошибки.
Вспомогательные функции:
FbxAMatrix MeshManager::GetGlobalPosition(FbxNode* pNode, const FbxTime& pTime, FbxPose* pPose, FbxAMatrix* pParentGlobalPosition)
{
FbxAMatrix lGlobalPosition;
bool lPositionFound = false;
if (pPose)
{
int lNodeIndex = pPose->Find(pNode);
if (lNodeIndex > -1)
{
// The bind pose is always a global matrix.
// If we have a rest pose, we need to check if it is
// stored in global or local space.
if (pPose->IsBindPose() || !pPose->IsLocalMatrix(lNodeIndex))
{
lGlobalPosition = GetPoseMatrix(pPose, lNodeIndex);
}
else
{
// We have a local matrix, we need to convert it to
// a global space matrix.
FbxAMatrix lParentGlobalPosition;
if (pParentGlobalPosition)
{
lParentGlobalPosition = *pParentGlobalPosition;
}
else
{
if (pNode->GetParent())
{
lParentGlobalPosition = GetGlobalPosition(pNode->GetParent(), pTime, pPose);
}
}
FbxAMatrix lLocalPosition = GetPoseMatrix(pPose, lNodeIndex);
lGlobalPosition = lParentGlobalPosition * lLocalPosition;
}
lPositionFound = true;
}
}
if (!lPositionFound)
{
// There is no pose entry for that node, get the current global position instead.
// Ideally this would use parent global position and local position to compute the global position.
// Unfortunately the equation
// lGlobalPosition = pParentGlobalPosition * lLocalPosition
// does not hold when inheritance type is other than "Parent" (RSrs).
// To compute the parent rotation and scaling is tricky in the RrSs and Rrs cases.
lGlobalPosition = pNode->EvaluateGlobalTransform(pTime);
}
return lGlobalPosition;
}
// Get the matrix of the given pose
FbxAMatrix MeshManager::GetPoseMatrix(FbxPose* pPose, int pNodeIndex)
{
FbxAMatrix lPoseMatrix;
FbxMatrix lMatrix = pPose->GetMatrix(pNodeIndex);
memcpy((double*)lPoseMatrix, (double*)lMatrix, sizeof(lMatrix.mData));
return lPoseMatrix;
}
// Get the geometry offset to a node. It is never inherited by the children.
FbxAMatrix MeshManager::GetGeometry(FbxNode* pNode)
{
const FbxVector4 lT = pNode->GetGeometricTranslation(FbxNode::eSourcePivot);
const FbxVector4 lR = pNode->GetGeometricRotation(FbxNode::eSourcePivot);
const FbxVector4 lS = pNode->GetGeometricScaling(FbxNode::eSourcePivot);
return FbxAMatrix(lT, lR, lS);
}
mat4 FbxMatToGlm(const FbxAMatrix& mat) {
dvec4 c0 = glm::make_vec4((double*)mat.GetColumn(0).Buffer());
dvec4 c1 = glm::make_vec4((double*)mat.GetColumn(1).Buffer());
dvec4 c2 = glm::make_vec4((double*)mat.GetColumn(2).Buffer());
dvec4 c3 = glm::make_vec4((double*)mat.GetColumn(3).Buffer());
glm::mat4 convertMatr = mat4(c0, c1, c2, c3);
return inverse(convertMatr);
}
Извлечение сетки:
void MeshManager::extractMeshRecursive(FbxScene* mScene, FbxNode* pNode, FbxAMatrix& pParentGlobalPosition, shared_ptr<Mesh> mesh, unsigned ¤tNode) {
// Find out what type of node this is
FbxNodeAttribute* lNodeAttribute = pNode->GetNodeAttribute();
FbxAMatrix lGlobalPosition = GetGlobalPosition(pNode, 1, mScene->GetPose(-1) , &pParentGlobalPosition);
FbxAMatrix lGeometryOffset = GetGeometry(pNode);
FbxAMatrix lGlobalOffsetPosition = lGlobalPosition * lGeometryOffset;
if (lNodeAttribute)
{
// Get the actual node mesh data if it is a mesh this time
// (You could use this like the sample where they draw other nodes like cameras)
if (lNodeAttribute->GetAttributeType() == FbxNodeAttribute::eMesh)
{
// Draw the actual mesh data
FbxMesh* lMesh = pNode->GetMesh();
if (lMesh->IsTriangleMesh() == false) {
FbxGeometryConverter conv(mFbxManager);
conv.Triangulate(lNodeAttribute, true);
}
const uint lVertexCount = lMesh->GetControlPointsCount();
const uint lTriangleCount = lMesh->GetPolygonCount();
// May not have any vertex data
if (lVertexCount == 0) return;
mesh->nodes.push_back(MeshNode());
FbxVector4* pControlPoints = lMesh->GetControlPoints();
for (uint i = 0; i < lVertexCount; i++)
{
mesh->nodes[currentNode].vertices.push_back(vec3((float)pControlPoints[i].mData[0], (float)pControlPoints[i].mData[1], (float)pControlPoints[i].mData[2]));
}
mesh->nodes[currentNode].localTransform = FbxMatToGlm(lGlobalOffsetPosition);
}
currentNode++;
}
... Extracting other vertex attributes and materials ...
// Now check if this node has any children attached
const int lChildCount = pNode->GetChildCount();
for (int lChildIndex = 0; lChildIndex < lChildCount; ++lChildIndex)
{
// Draw this child
extractMeshRecursive(mScene, pNode->GetChild(lChildIndex), lGlobalPosition, mesh, currentNode);
}
}
Я получаю результат, который выглядит следующим образом: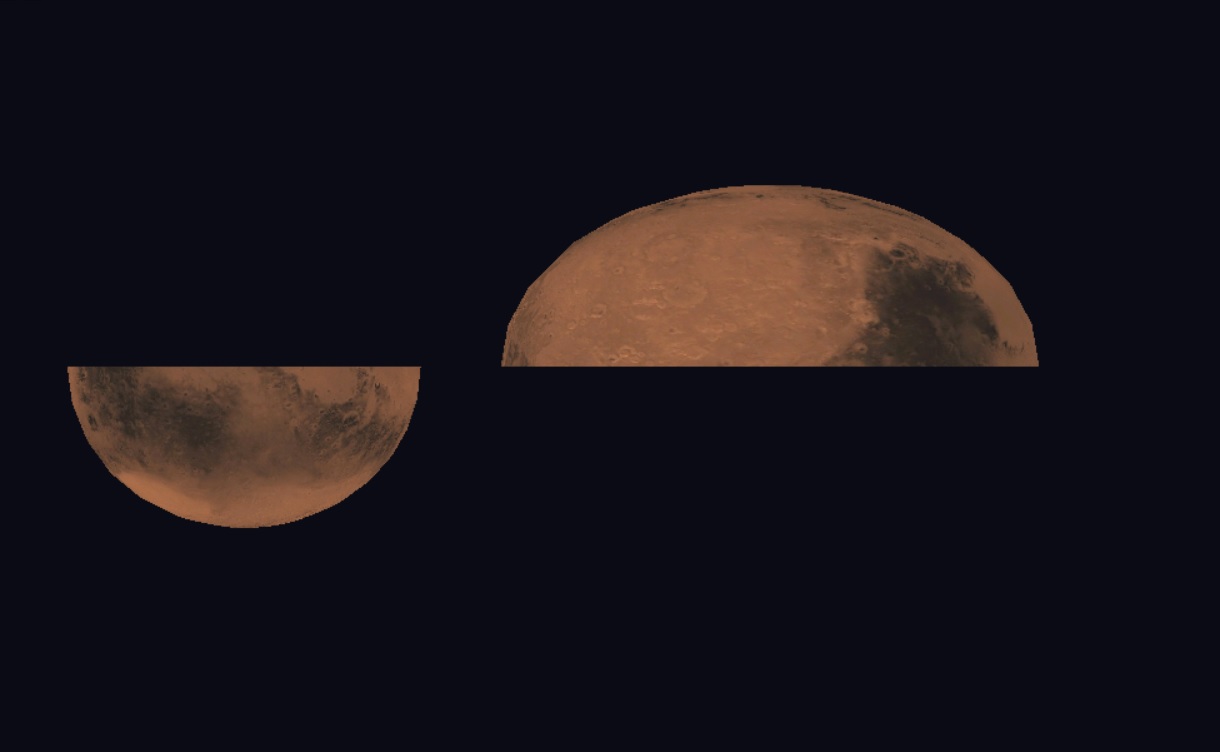
В отличие от: 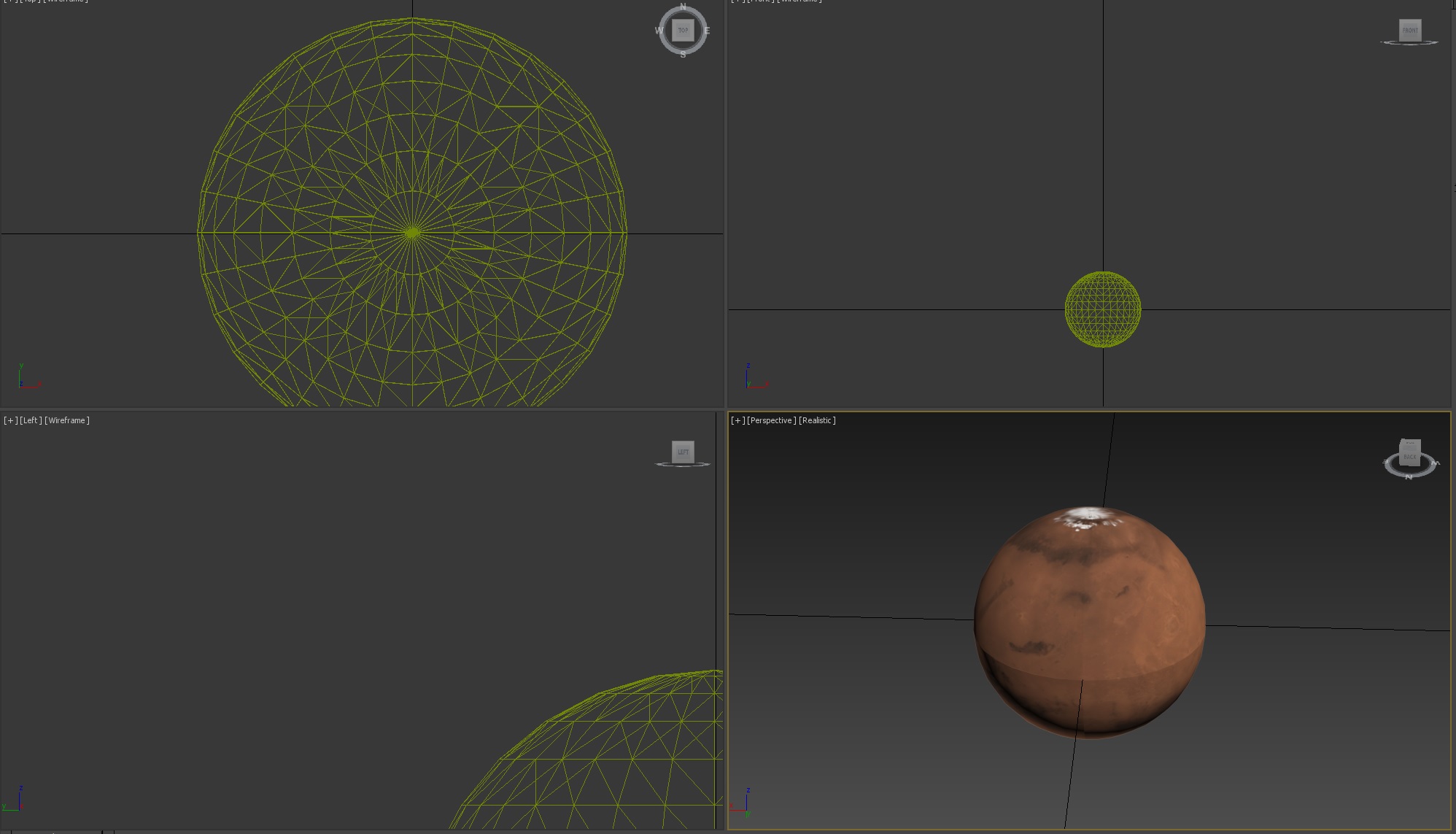
Решение
Неправильная часть была здесь:
mat4 FbxMatToGlm(const FbxAMatrix& mat) {
dvec4 c0 = glm::make_vec4((double*)mat.GetColumn(0).Buffer());
dvec4 c1 = glm::make_vec4((double*)mat.GetColumn(1).Buffer());
dvec4 c2 = glm::make_vec4((double*)mat.GetColumn(2).Buffer());
dvec4 c3 = glm::make_vec4((double*)mat.GetColumn(3).Buffer());
glm::mat4 convertMatr = mat4(c0, c1, c2, c3);
return inverse(convertMatr); // <--- Incorrect
}
Не было необходимости инвертировать полученную матрицу. Это должно было быть транспонировать вместо. Что я и сделал вначале, но нескорректированный масштаб сетки был настолько огромен, что я не смог увидеть его в моем рендере, и я начал с ним возиться. После сдачи миллиметры как в модуле в окне экспорта FBX 3D Studio, все преобразования были правильными.
Другие решения
Других решений пока нет …