Расчет перекоса текста OpenCV
Я пытаюсь вычислить перекос текста на изображении, чтобы исправить его для получения лучших результатов распознавания.
В настоящее время это функция, которую я использую:
double compute_skew(Mat &img)
{
// Binarize
cv::threshold(img, img, 225, 255, cv::THRESH_BINARY);
// Invert colors
cv::bitwise_not(img, img);
cv::Mat element = cv::getStructuringElement(cv::MORPH_RECT, cv::Size(5, 3));
cv::erode(img, img, element);
std::vector<cv::Point> points;
cv::Mat_<uchar>::iterator it = img.begin<uchar>();
cv::Mat_<uchar>::iterator end = img.end<uchar>();
for (; it != end; ++it)
if (*it)
points.push_back(it.pos());
cv::RotatedRect box = cv::minAreaRect(cv::Mat(points));
double angle = box.angle;
if (angle < -45.)
angle += 90.;
cv::Point2f vertices[4];
box.points(vertices);
for(int i = 0; i < 4; ++i)
cv::line(img, vertices[i], vertices[(i + 1) % 4], cv::Scalar(255, 0, 0), 1, CV_AA);
return angle;
}
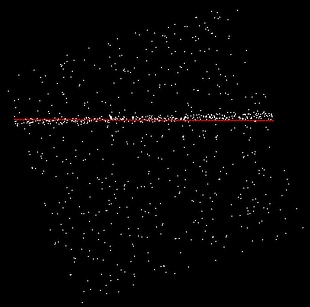
Когда я смотрю на угол в отладке, я получаю 0.000000
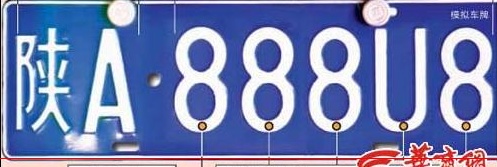
Однако, когда я даю ему это изображение, я получаю правильные результаты с перекосом около 16 градусов:
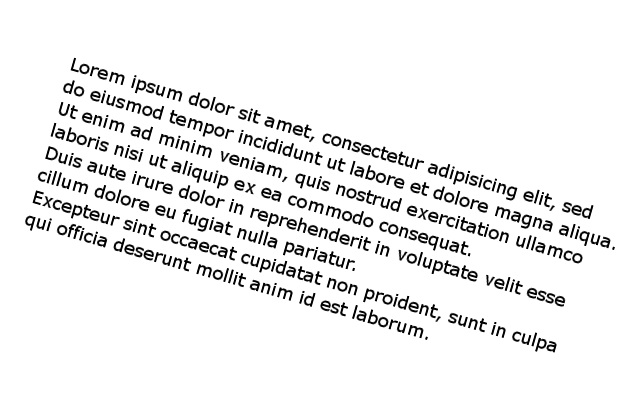
Как правильно определить перекос на первом изображении?
Решение
Есть несколько других способов получить степень перекоса, 1) путем грубого преобразования 2) по горизонтальному профилю проекции. поверните изображение под разными углами и рассчитайте горизонтальную проекцию. угол с наибольшим значением горизонтальной гистограммы является углом наклона.
Я представил ниже реализацию 1). Я считаю, что это лучше, чем метод бокса, который вы используете, потому что он требует, чтобы вы полностью очистили изображение от любого шума, что просто невозможно в большинстве случаев.
Вы должны знать, что метод не работает хорошо, если слишком много шума. Вы можете уменьшить шум различными способами в зависимости от того, какой тип «линии» вы хотите считать наиболее доминирующим на изображении. я предоставил два метода для этого. обязательно поиграйте с параметрами, порогом и т. д.
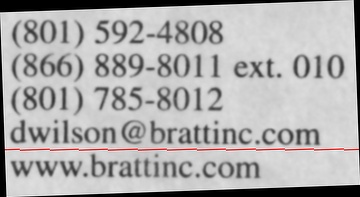
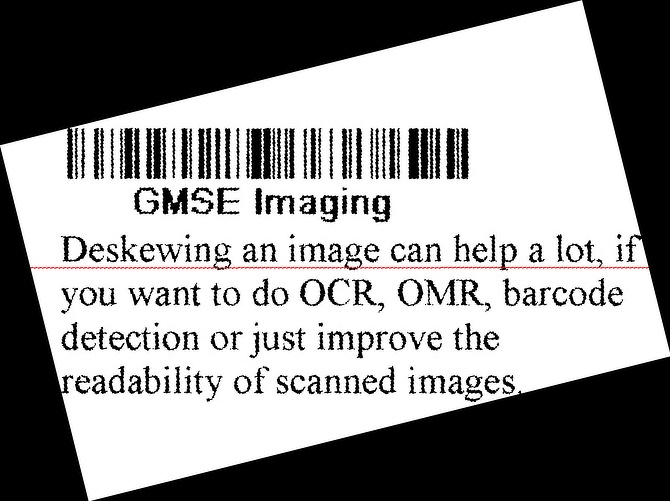
результаты (все запускаются с использованием preprocess2, все запускаются с использованием одного набора параметров)








код
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
void hough_transform(Mat& im,Mat& orig,double* skew)
{
double max_r=sqrt(pow(.5*im.cols,2)+pow(.5*im.rows,2));
int angleBins = 180;
Mat acc = Mat::zeros(Size(2*max_r,angleBins),CV_32SC1);
int cenx = im.cols/2;
int ceny = im.rows/2;
for(int x=1;x<im.cols-1;x++)
{
for(int y=1;y<im.rows-1;y++)
{
if(im.at<uchar>(y,x)==255)
{
for(int t=0;t<angleBins;t++)
{
double r =(x-cenx)*cos((double)t/angleBins*CV_PI)+(y-ceny)*sin((double)t /angleBins*CV_PI);
r+=max_r;
acc.at<int>(t,int(r))++;
}
}
}
}
Mat thresh;
normalize(acc,acc,255,0,NORM_MINMAX);
convertScaleAbs(acc,acc);
/*debug
Mat cmap;
applyColorMap(acc,cmap,COLORMAP_JET);
imshow("cmap",cmap);
imshow("acc",acc);*/
Point maxLoc;
minMaxLoc(acc,0,0,0,&maxLoc);
double theta = (double)maxLoc.y/angleBins*CV_PI;
double rho = maxLoc.x-max_r;
if(abs(sin(theta))<0.000001)//check vertical
{
//when vertical, line equation becomes
//x = rho
double m = -cos(theta)/sin(theta);
Point2d p1 = Point2d(rho+im.cols/2,0);
Point2d p2 = Point2d(rho+im.cols/2,im.rows);
line(orig,p1,p2,Scalar(0,0,255),1);
*skew=90;
cout<<"skew angle "<<" 90"<<endl;
}else
{
//convert normal form back to slope intercept form
//y = mx + b
double m = -cos(theta)/sin(theta);
double b = rho/sin(theta)+im.rows/2.-m*im.cols/2.;
Point2d p1 = Point2d(0,b);
Point2d p2 = Point2d(im.cols,im.cols*m+b);
line(orig,p1,p2,Scalar(0,0,255),1);
double skewangle;
skewangle= p1.x-p2.x>0? (atan2(p1.y-p2.y,p1.x-p2.x)*180./CV_PI):(atan2(p2.y-p1.y,p2. x-p1.x)*180./CV_PI);
*skew=skewangle;
cout<<"skew angle "<<skewangle<<endl;
}
imshow("orig",orig);
}
Mat preprocess1(Mat& im)
{
Mat ret = Mat::zeros(im.size(),CV_32SC1);
for(int x=1;x<im.cols-1;x++)
{
for(int y=1;y<im.rows-1;y++)
{
int gy = (im.at<uchar>(y-1,x+1)-im.at<uchar>(y-1,x-1))
+2*(im.at<uchar>(y,x+1)-im.at<uchar>(y,x-1))
+(im.at<uchar>(y+1,x+1)-im.at<uchar>(y+1,x-1));
int gx = (im.at<uchar>(y+1,x-1) -im.at<uchar>(y-1,x-1))
+2*(im.at<uchar>(y+1,x)-im.at<uchar>(y-1,x))
+(im.at<uchar>(y+1,x+1)-im.at<uchar>(y-1,x+1));
int g2 = (gy*gy + gx*gx);
ret.at<int>(y,x)=g2;
}
}
normalize(ret,ret,255,0,NORM_MINMAX);
ret.convertTo(ret,CV_8UC1);
threshold(ret,ret,50,255,THRESH_BINARY);
return ret;
}
Mat preprocess2(Mat& im)
{
// 1) assume white on black and does local thresholding
// 2) only allow voting top is white and buttom is black(buttom text line)
Mat thresh;
//thresh=255-im;
thresh=im.clone();
adaptiveThreshold(thresh,thresh,255,CV_ADAPTIVE_THRESH_GAUSSIAN_C,THRESH_BINARY,15,-2);
Mat ret = Mat::zeros(im.size(),CV_8UC1);
for(int x=1;x<thresh.cols-1;x++)
{
for(int y=1;y<thresh.rows-1;y++)
{
bool toprowblack = thresh.at<uchar>(y-1,x)==0 || thresh.at<uchar>(y-1,x-1)==0 || thresh.at<uchar>(y-1,x+1)==0;
bool belowrowblack = thresh.at<uchar>(y+1,x)==0 || thresh.at<uchar>(y+1, x-1)==0 || thresh.at<uchar>(y+1,x+1)==0;
uchar pix=thresh.at<uchar>(y,x);
if((!toprowblack && pix==255 && belowrowblack))
{
ret.at<uchar>(y,x) = 255;
}
}
}
return ret;
}
Mat rot(Mat& im,double thetaRad)
{
cv::Mat rotated;
double rskew = thetaRad* CV_PI/180;
double nw = abs(sin(thetaRad))*im.rows+abs(cos(thetaRad))*im.cols;
double nh = abs(cos(thetaRad))*im.rows+abs(sin(thetaRad))*im.cols;
cv::Mat rot_mat = cv::getRotationMatrix2D(Point2d(nw*.5,nh*.5), thetaRad*180/CV_PI, 1);
Mat pos = Mat::zeros(Size(1,3),CV_64FC1);
pos.at<double>(0)=(nw-im.cols)*.5;
pos.at<double>(1)=(nh-im.rows)*.5;
Mat res = rot_mat*pos;
rot_mat.at<double>(0,2) += res.at<double>(0);
rot_mat.at<double>(1,2) += res.at<double>(1);
cv::warpAffine(im, rotated, rot_mat,Size(nw,nh), cv::INTER_LANCZOS4);
return rotated;
}
int main(int argc, char** argv)
{
string src="C:/data/skew.png";
Mat im= imread(src);
Mat gray;
cvtColor(im,gray,CV_BGR2GRAY);
Mat preprocessed = preprocess2(gray);
imshow("preprocessed2",preprocessed);
double skew;
hough_transform(preprocessed,im,&skew);
Mat rotated = rot(im,skew* CV_PI/180);
imshow("corrected",rotated);
waitKey(0);
return 0;
}
Другие решения
Подход, который вы опубликовали, имеет собственное предположение «идеальной бинаризации». пороговое значение напрямую влияет на процесс. использовать порог отсу, или думать о ДПФ для общего решения.
испытание отсу:
int main()
{
Mat input = imread("your text");
cvtColor(input, input, CV_BGR2GRAY);
Mat img;
cv::threshold(input, img, 100, 255, cv::THRESH_OTSU);
cv::bitwise_not(img, img);
imshow("img ", img);
waitKey(0);
vector<Point> points;
findNonZero(img, points);
cv::RotatedRect box = cv::minAreaRect(points);
double angle = box.angle;
if (angle < -45.)
angle += 90.;
cv::Point2f vertices[4];
box.points(vertices);
for(int i = 0; i < 4; ++i)
cv::line(img, vertices[i], vertices[(i + 1) % 4], cv::Scalar(255, 0, 0));
imshow("img ", img);
waitKey(0);
return 0;
}