Почему этот алгоритм переупорядочения треугольника приводит к случайным связям?
Итак, я нашел этот алгоритм переупорядочения / оптимизации индекса, который должен сортировать треугольники, составляющие произвольную трехмерную сетку, таким образом, чтобы улучшить пространственную локализацию, надеясь повысить производительность в приложении рендеринга в реальном времени.
https://github.com/bkaradzic/bgfx/blob/master/3rdparty/forsyth-too/forsythtriangleorderoptimizer.cpp
Я сталкиваюсь с проблемами во время тестирования.
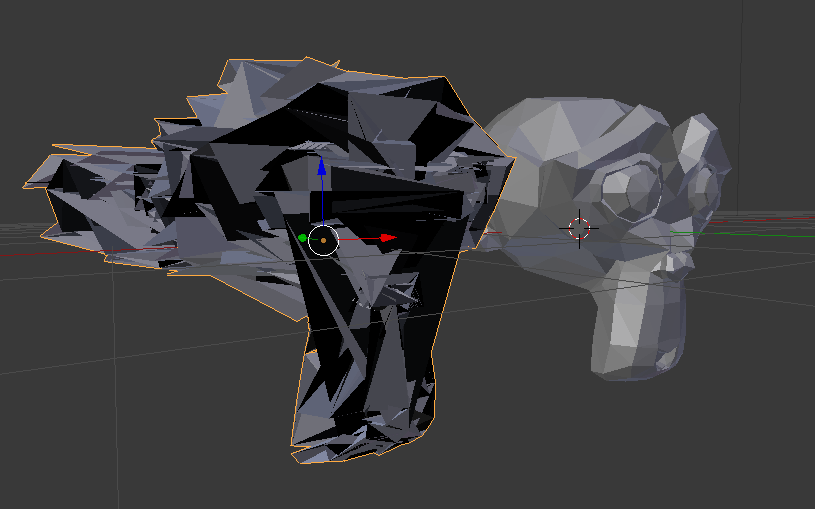
Я экспортировал сетку обезьян Сюзанны из Blender в файл ply и написал себе отвратительную программу тестирования, которая читает файл ply, извлекает данные индексов, сортирует их с помощью вышеупомянутого алгоритма и создает переупорядоченный файл ply, готовый для импорта обратно в Blender для визуального отображения. проверьте результаты … которые не являются многообещающими:
Пакет с исходным кодом и тестовым файлом доступен здесь:
http://www.mediafire.com/download/4nckwq8dezndsbo/forsyth.zip
Единственная модификация, которую я применил к исходному алгоритму, состояла в том, чтобы заменить все экземпляры «uint16» на «uint», так как моя амигдала пришла к выводу, что 16-битный индексный список является ненужным ограничением.
В любом случае я публикую здесь источник:
test2.cpp:
#include <stdio.h>
#include "forsythtriangleorderoptimizer.h"#include <malloc.h>
typedef struct {
float coords[3];
float normals[3];
unsigned char color[3];
//char uv[2];
} vert;
typedef unsigned int uint;
//typedef unsigned short uint16;
typedef unsigned char byte;int main() {
FILE *in_ply, *face_dump, *reordered;
vert buffv2;
in_ply=fopen("suzanne.ply","r"); // x y z nx ny nz r g b
face_dump=fopen("suzanne_reordered.txt","w");
int vertices, faces, gg, line=0, tt, startpos;
//extract vertices/faces totals.
line=0;
while (1) {
gg=getc(in_ply);
if (gg=='\n') line++;
if (line==3) fscanf(in_ply, "element vertex %d", &vertices);
if (line==13) fscanf(in_ply, "element face %d", &faces);
if (line==16) break;
}
printf("vertices: %d ", vertices);
printf("faces: %d\n", faces);
//pass-through loop to reach indices data
for (tt=0; tt<vertices; tt++) {
fscanf(in_ply, "%f %f %f %f %f %f %d %d %d\n",
&buffv2.coords[0], &buffv2.coords[1], &buffv2.coords[2],
&buffv2.normals[0], &buffv2.normals[1], &buffv2.normals[2],
&buffv2.color[0], &buffv2.color[1], &buffv2.color[2] );
}
startpos = ftell(in_ply);
uint* indices=(uint*)calloc(faces, 3*sizeof(int));
uint* newIndexList=(uint*)calloc(faces, 3*sizeof(int));
for (tt=0; tt<faces; tt++) {
fscanf(in_ply, "3 %d %d %d\n", &indices[tt], &indices[tt+1], &indices[tt+2]);
}
//call the reorder function
Forsyth::OptimizeFaces(indices, (uint)faces*3, (uint)vertices, newIndexList, (uint)16);
//dump the reordered indices in a separate file
for (tt=0; tt<faces; tt++) {
fprintf(face_dump, "3 %d %d %d\n", newIndexList[tt], newIndexList[tt+1], newIndexList[tt+2]);
}
//build new ply file with ordered indices
reordered=fopen("suzanne_reordered.ply","wb");
rewind(in_ply);
while(1) {
gg=getc(in_ply);
putc(gg, reordered);
if (ftell(in_ply)==startpos) break;
}
for (tt=0; tt<faces; tt++) {
fprintf(reordered, "3 %d %d %d\n", newIndexList[tt], newIndexList[tt+1], newIndexList[tt+2]);
}free(indices);
free(newIndexList);
fclose(in_ply);
fclose(face_dump);
fclose(reordered);
return 0;
}
forsythtriangleorderoptimizer.h:
//-----------------------------------------------------------------------------
// This is an implementation of Tom Forsyth's "Linear-Speed Vertex Cache
// Optimization" algorithm as described here:
// http://home.comcast.net/~tom_forsyth/papers/fast_vert_cache_opt.html
//
// This code was authored and released into the public domain by
// Adrian Stone ([email protected]).
//
// THIS SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
// IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
// FITNESS FOR A PARTICULAR PURPOSE, TITLE AND NON-INFRINGEMENT. IN NO EVENT
// SHALL ANYONE DISTRIBUTING THE SOFTWARE BE LIABLE FOR ANY DAMAGES OR OTHER
// LIABILITY, WHETHER IN CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR
// IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
//-----------------------------------------------------------------------------
#include <assert.h>
#include <math.h>
#include <vector>
#include <limits>
#include <algorithm>
namespace Forsyth
{
typedef unsigned int uint;
//typedef unsigned short uint16;
typedef unsigned char byte;
//-----------------------------------------------------------------------------
// OptimizeFaces
//-----------------------------------------------------------------------------
// Parameters:
// indexList
// input index list
// indexCount
// the number of indices in the list
// vertexCount
// the largest index value in indexList
// newIndexList
// a pointer to a preallocated buffer the same size as indexList to
// hold the optimized index list
// lruCacheSize
// the size of the simulated post-transform cache (max:64)
//-----------------------------------------------------------------------------
void OptimizeFaces(const uint* indexList, uint indexCount, uint vertexCount, uint* newIndexList, uint lruCacheSize);
namespace
{
// code for computing vertex score was taken, as much as possible
// directly from the original publication.
float ComputeVertexCacheScore(int cachePosition, uint vertexCacheSize)
{
const float FindVertexScore_CacheDecayPower = 1.5f;
const float FindVertexScore_LastTriScore = 0.75f;
float score = 0.0f;
if ( cachePosition < 0 )
{
// Vertex is not in FIFO cache - no score.
}
else
{
if ( cachePosition < 3 )
{
// This vertex was used in the last triangle,
// so it has a fixed score, whichever of the three
// it's in. Otherwise, you can get very different
// answers depending on whether you add
// the triangle 1,2,3 or 3,1,2 - which is silly.
score = FindVertexScore_LastTriScore;
}
else
{
assert ( cachePosition < vertexCacheSize );
// Points for being high in the cache.
const float scaler = 1.0f / ( vertexCacheSize - 3 );
score = 1.0f - ( cachePosition - 3 ) * scaler;
score = powf ( score, FindVertexScore_CacheDecayPower );
}
}
return score;
}
float ComputeVertexValenceScore(uint numActiveFaces)
{
const float FindVertexScore_ValenceBoostScale = 2.0f;
const float FindVertexScore_ValenceBoostPower = 0.5f;
float score = 0.f;
// Bonus points for having a low number of tris still to
// use the vert, so we get rid of lone verts quickly.
float valenceBoost = powf ( static_cast<float>(numActiveFaces),
-FindVertexScore_ValenceBoostPower );
score += FindVertexScore_ValenceBoostScale * valenceBoost;
return score;
}const uint kMaxVertexCacheSize = 64;
const uint kMaxPrecomputedVertexValenceScores = 64;
float s_vertexCacheScores[kMaxVertexCacheSize+1][kMaxVertexCacheSize];
float s_vertexValenceScores[kMaxPrecomputedVertexValenceScores];
bool ComputeVertexScores()
{
for (uint cacheSize=0; cacheSize<=kMaxVertexCacheSize; ++cacheSize)
{
for (uint cachePos=0; cachePos<cacheSize; ++cachePos)
{
s_vertexCacheScores[cacheSize][cachePos] = ComputeVertexCacheScore(cachePos, cacheSize);
}
}
for (uint valence=0; valence<kMaxPrecomputedVertexValenceScores; ++valence)
{
s_vertexValenceScores[valence] = ComputeVertexValenceScore(valence);
}
return true;
}
bool s_vertexScoresComputed = ComputeVertexScores();
inline float FindVertexCacheScore(uint cachePosition, uint maxSizeVertexCache)
{
return s_vertexCacheScores[maxSizeVertexCache][cachePosition];
}
inline float FindVertexValenceScore(uint numActiveTris)
{
return s_vertexValenceScores[numActiveTris];
}
float FindVertexScore(uint numActiveFaces, uint cachePosition, uint vertexCacheSize)
{
assert(s_vertexScoresComputed);
if ( numActiveFaces == 0 )
{
// No tri needs this vertex!
return -1.0f;
}
float score = 0.f;
if (cachePosition < vertexCacheSize)
{
score += s_vertexCacheScores[vertexCacheSize][cachePosition];
}
if (numActiveFaces < kMaxPrecomputedVertexValenceScores)
{
score += s_vertexValenceScores[numActiveFaces];
}
else
{
score += ComputeVertexValenceScore(numActiveFaces);
}
return score;
}
struct OptimizeVertexData
{
float score;
uint activeFaceListStart;
uint activeFaceListSize;
uint cachePos0;
uint cachePos1;
OptimizeVertexData() : score(0.f), activeFaceListStart(0), activeFaceListSize(0), cachePos0(0), cachePos1(0) { }
};
}
void OptimizeFaces(const uint* indexList, uint indexCount, uint vertexCount, uint* newIndexList, uint lruCacheSize)
{
std::vector<OptimizeVertexData> vertexDataList;
vertexDataList.resize(vertexCount);
// compute face count per vertex
for (uint i=0; i<indexCount; ++i)
{
uint index = indexList[i];
assert(index < vertexCount);
OptimizeVertexData& vertexData = vertexDataList[index];
vertexData.activeFaceListSize++;
}
std::vector<uint> activeFaceList;
const uint kEvictedCacheIndex = std::numeric_limits<uint>::max();
{
// allocate face list per vertex
uint curActiveFaceListPos = 0;
for (uint i=0; i<vertexCount; ++i)
{
OptimizeVertexData& vertexData = vertexDataList[i];
vertexData.cachePos0 = kEvictedCacheIndex;
vertexData.cachePos1 = kEvictedCacheIndex;
vertexData.activeFaceListStart = curActiveFaceListPos;
curActiveFaceListPos += vertexData.activeFaceListSize;
vertexData.score = FindVertexScore(vertexData.activeFaceListSize, vertexData.cachePos0, lruCacheSize);
vertexData.activeFaceListSize = 0;
}
activeFaceList.resize(curActiveFaceListPos);
}
// fill out face list per vertex
for (uint i=0; i<indexCount; i+=3)
{
for (uint j=0; j<3; ++j)
{
uint index = indexList[i+j];
OptimizeVertexData& vertexData = vertexDataList[index];
activeFaceList[vertexData.activeFaceListStart + vertexData.activeFaceListSize] = i;
vertexData.activeFaceListSize++;
}
}
std::vector<byte> processedFaceList;
processedFaceList.resize(indexCount);
uint vertexCacheBuffer[(kMaxVertexCacheSize+3)*2];
uint* cache0 = vertexCacheBuffer;
uint* cache1 = vertexCacheBuffer+(kMaxVertexCacheSize+3);
uint entriesInCache0 = 0;
uint bestFace = 0;
float bestScore = -1.f;
const float maxValenceScore = FindVertexScore(1, kEvictedCacheIndex, lruCacheSize) * 3.f;
for (uint i = 0; i < indexCount; i += 3)
{
if (bestScore < 0.f)
{
// no verts in the cache are used by any unprocessed faces so
// search all unprocessed faces for a new starting point
for (uint j = 0; j < indexCount; j += 3)
{
if (processedFaceList[j] == 0)
{
uint face = j;
float faceScore = 0.f;
for (uint k=0; k<3; ++k)
{
uint index = indexList[face+k];
OptimizeVertexData& vertexData = vertexDataList[index];
assert(vertexData.activeFaceListSize > 0);
assert(vertexData.cachePos0 >= lruCacheSize);
faceScore += vertexData.score;
}
if (faceScore > bestScore)
{
bestScore = faceScore;
bestFace = face;
assert(bestScore <= maxValenceScore);
if (bestScore >= maxValenceScore)
{
break;
}
}
}
}
assert(bestScore >= 0.f);
}
processedFaceList[bestFace] = 1;
uint entriesInCache1 = 0;
// add bestFace to LRU cache and to newIndexList
for (uint v = 0; v < 3; ++v)
{
uint index = indexList[bestFace+v];
newIndexList[i+v] = index;
OptimizeVertexData& vertexData = vertexDataList[index];
if (vertexData.cachePos1 >= entriesInCache1)
{
vertexData.cachePos1 = entriesInCache1;
cache1[entriesInCache1++] = index;
if (vertexData.activeFaceListSize == 1)
{
--vertexData.activeFaceListSize;
continue;
}
}
assert(vertexData.activeFaceListSize > 0);
uint* begin = &activeFaceList[vertexData.activeFaceListStart];
uint* end = &activeFaceList[vertexData.activeFaceListStart + vertexData.activeFaceListSize];
uint* it = std::find(begin, end, bestFace);
assert(it != end);
std::swap(*it, *(end-1));
--vertexData.activeFaceListSize;
vertexData.score = FindVertexScore(vertexData.activeFaceListSize, vertexData.cachePos1, lruCacheSize);
}
// move the rest of the old verts in the cache down and compute their new scores
for (uint c0 = 0; c0 < entriesInCache0; ++c0)
{
uint index = cache0[c0];
OptimizeVertexData& vertexData = vertexDataList[index];
if (vertexData.cachePos1 >= entriesInCache1)
{
vertexData.cachePos1 = entriesInCache1;
cache1[entriesInCache1++] = index;
vertexData.score = FindVertexScore(vertexData.activeFaceListSize, vertexData.cachePos1, lruCacheSize);
}
}
// find the best scoring triangle in the current cache (including up to 3 that were just evicted)
bestScore = -1.f;
for (uint c1 = 0; c1 < entriesInCache1; ++c1)
{
uint index = cache1[c1];
OptimizeVertexData& vertexData = vertexDataList[index];
vertexData.cachePos0 = vertexData.cachePos1;
vertexData.cachePos1 = kEvictedCacheIndex;
for (uint j=0; j<vertexData.activeFaceListSize; ++j)
{
uint face = activeFaceList[vertexData.activeFaceListStart+j];
float faceScore = 0.f;
for (uint v=0; v<3; v++)
{
uint faceIndex = indexList[face+v];
OptimizeVertexData& faceVertexData = vertexDataList[faceIndex];
faceScore += faceVertexData.score;
}
if (faceScore > bestScore)
{
bestScore = faceScore;
bestFace = face;
}
}
}
std::swap(cache0, cache1);
entriesInCache0 = std::min(entriesInCache1, lruCacheSize);
}
}
} // namespace Forsyth
Решение
вы не переписываете индексы здесь?
for (tt=0; tt<faces; tt++) {
fscanf(in_ply, "3 %d %d %d\n", &indices[tt], &indices[tt+1], &indices[tt+2]);
}
Для tt == 0 вы получите показатели 0, 1, 2. Для tt == 1 вы напишите индексы 1,2,3, которые, я думаю, должны быть 3,4,5 (tt * 3, tt * 3 + 1, тт * 3 + 2)
Другие решения