Ошибка подтверждения при реализации алгоритма SIFT: opencv
Я использую OpenCV 2.4.8 и Studio 2013, и я получаю ошибку во время выполнения. Мой основной код это ..
#include<opencv2\core\core.hpp>
#include<opencv2\highgui\highgui.hpp>
#include<opencv2\imgproc\imgproc.hpp>
#include"SIFT.h"#include<iostream>
#include<stdio.h>
#include<conio.h>
using namespace cv;
using namespace std;
int main()
{
cout << "hello";
Mat image = imread("abc.jpg",0);
cout << image.channels() << endl;
SIFT controller(image);
controller.DoSIFT();
waitKey(100000);
}
и мой код файла заголовка, как показано ниже
#include<opencv2\core\core.hpp>
#include<opencv2\highgui\highgui.hpp>
#include<opencv2\imgproc\imgproc.hpp>
#include<iostream>
using namespace cv;
using namespace std;
class SIFT{
private:
Mat image_orig;
Mat Scale_spaces[4][6];
Mat LOG_img[4][4];
Mat Extrema[4][2];
Mat image_temp;
Mat middle, up, down;void BuildScaleSpace()
{
cout << "in build space" <<endl;
int i, j;
//image should be in grey scale
cout << endl<<image_temp.rows << image_temp.cols << endl;
GaussianBlur(image_temp, image_temp, cv::Size(5, 5), 0.5);
resize(image_temp, image_temp, Size(image_temp.cols * 2, image_temp.rows * 2), 0, 0, 1);
cout << image_temp.rows << image_temp.cols << endl;
Scale_spaces[0][0] =image_temp;
cout << endl << image_temp.rows << image_temp.cols << endl;
GaussianBlur(Scale_spaces[0][0], Scale_spaces[0][0], cv::Size(5, 5), 1);
double int_sigma = sqrt(2) / 2;
double sigma = int_sigma;;
double mid;
double power = 1.0;
for (i = 0; i < 4; i++)
{
if (i>0)
{
sigma = mid;
Scale_spaces[i][0] = image_temp;
resize(image_temp, Scale_spaces[i][0], Size(image_temp.cols / power, image_temp.rows / power), 0, 0, 1);
cout << endl << "after resizing" << Scale_spaces[i][0].rows << Scale_spaces[i][0].cols << endl;
}
for (j = 1; j <= 5; j++)
{
if (j == 2)
mid = sigma;
// printf(" %f ", sigma);
GaussianBlur(Scale_spaces[i][j-1], Scale_spaces[i][j], cv::Size(5, 5), sigma);
sigma = sigma*sqrt(2);
}
// printf("\n");
power = power * 2;
}}
void ShowScaleSpace()
{
cout << "\n show scale\n\n";
namedWindow("image", CV_WINDOW_AUTOSIZE);
int i, j;
for (i = 0; i < 4; i++)
{
for (j = 0; j <= 5; j++)
{
cout << i<<" "<<j<<endl;
cout << Scale_spaces[i][j].rows<<" " << Scale_spaces[i][j].cols << endl;
imshow("image", Scale_spaces[i][j]);
cvWaitKey(700);
}
}
}
void FindLOG()
{
cout << endl << "IN LOG " << endl;
int i;
int j;
for (i = 0; i < 4; i++)
{
for (j = 1; j < 5; j++)
{
addWeighted(Scale_spaces[i][j], 1, Scale_spaces[i][j + 1], -1,0, LOG_img[i][j - 1]);
}
}
}
void FindMaxMin()
{
cout << endl << "IN findmaxmin " << endl;
int i;
int j;
int xiter, yiter;
for (i = 0; i < 4; i++)
{
for (j = 1; j < 3; j++)
{
std::cout << LOG_img[i][j].channels();
middle = LOG_img[i][j].clone();
up = LOG_img[i][j - 1].clone();
down = LOG_img[i][j + 1].clone();
for (yiter = 1; yiter < middle.rows-1; yiter++)
{
for (xiter = 1; xiter < middle.cols-1; xiter++)
{
cout << i << " " << j << " " << yiter << " " << xiter<< " "<<endl;
double currentPixel = middle.at<uchar>(yiter, xiter);
cout << "1 ";
// Check for a maximum
if (cout << "helllo 2hhukjhgkj"&¤tPixel> middle.at<uchar>(yiter, xiter + 1) &&
currentPixel> middle.at<uchar>(yiter, xiter - 1) &&
currentPixel > middle.at<uchar>(yiter + 1, xiter) &&
currentPixel > middle.at<uchar>(yiter + 1, xiter - 1) &&
currentPixel > middle.at<uchar>(yiter, xiter + 1) &&
currentPixel > middle.at<uchar>(yiter - 1, xiter) &&
currentPixel > middle.at<uchar>(yiter - 1, xiter + 1) &&
currentPixel > middle.at<uchar>(yiter - 1, xiter - 1) &&
currentPixel > up.at<uchar>(yiter, xiter) &&
currentPixel > up.at<uchar>(yiter, xiter + 1) &&
currentPixel > up.at<uchar>(yiter, xiter - 1) &&
currentPixel > up.at<uchar>(yiter + 1, xiter) &&
currentPixel > up.at<uchar>(yiter + 1, xiter - 1) &&
currentPixel > up.at<uchar>(yiter, xiter + 1) &&
currentPixel > up.at<uchar>(yiter - 1, xiter) &&
currentPixel > up.at<uchar>(yiter - 1, xiter + 1) &&
currentPixel > up.at<uchar>(yiter - 1, xiter - 1) &&
currentPixel > down.at<uchar>(yiter, xiter) &&
currentPixel > down.at<uchar>(yiter, xiter + 1) &&
currentPixel > down.at<uchar>(yiter, xiter - 1) &&
currentPixel > down.at<uchar>(yiter + 1, xiter) &&
currentPixel > down.at<uchar>(yiter + 1, xiter - 1) &&
currentPixel > down.at<uchar>(yiter, xiter + 1) &&
currentPixel > down.at<uchar>(yiter - 1, xiter) &&
currentPixel > down.at<uchar>(yiter - 1, xiter + 1) &&
currentPixel > down.at<uchar>(yiter - 1, xiter - 1)
)
{
cout << "inside, updating extrema ";
Extrema[i][j - 1].at<uchar>(xiter, yiter) = 255;
}
else if (currentPixel< middle.at<uchar>(yiter, xiter + 1) &&
currentPixel< middle.at<uchar>(yiter, xiter - 1) &&
currentPixel < middle.at<uchar>(yiter + 1, xiter) &&
currentPixel < middle.at<uchar>(yiter + 1, xiter - 1) &&
currentPixel < middle.at<uchar>(yiter, xiter + 1) &&
currentPixel < middle.at<uchar>(yiter - 1, xiter) &&
currentPixel < middle.at<uchar>(yiter - 1, xiter + 1) &&
currentPixel < middle.at<uchar>(yiter - 1, xiter - 1) &&
currentPixel < up.at<uchar>(yiter, xiter) &&
currentPixel < up.at<uchar>(yiter, xiter + 1) &&
currentPixel < up.at<uchar>(yiter, xiter - 1) &&
currentPixel < up.at<uchar>(yiter + 1, xiter) &&
currentPixel < up.at<uchar>(yiter + 1, xiter - 1) &&
currentPixel < up.at<uchar>(yiter, xiter + 1) &&
currentPixel < up.at<uchar>(yiter - 1, xiter) &&
currentPixel < up.at<uchar>(yiter - 1, xiter + 1) &&
currentPixel < up.at<uchar>(yiter - 1, xiter - 1) &&
currentPixel < down.at<uchar>(yiter, xiter) &&
currentPixel < down.at<uchar>(yiter, xiter + 1) &&
currentPixel < down.at<uchar>(yiter, xiter - 1) &&
currentPixel < down.at<uchar>(yiter + 1, xiter) &&
currentPixel < down.at<uchar>(yiter + 1, xiter - 1) &&
currentPixel < down.at<uchar>(yiter, xiter + 1) &&
currentPixel < down.at<uchar>(yiter - 1, xiter) &&
currentPixel < down.at<uchar>(yiter - 1, xiter + 1) &&
currentPixel < down.at<uchar>(yiter - 1, xiter - 1)
)
{
Extrema[i][j - 1].at<uchar>(xiter, yiter) = 255;
}
else
Extrema[i][j - 1].at<uchar>(xiter, yiter) = 0;
}}
}
}
}public:
SIFT(Mat Image)
{
image_orig = Image;
image_temp = Image;
}
void DoSIFT()
{
BuildScaleSpace();
//ShowScaleSpace();
FindLOG();
FindMaxMin();}};
сборка прошла успешно, но во время выполнения выдает следующую ошибку.
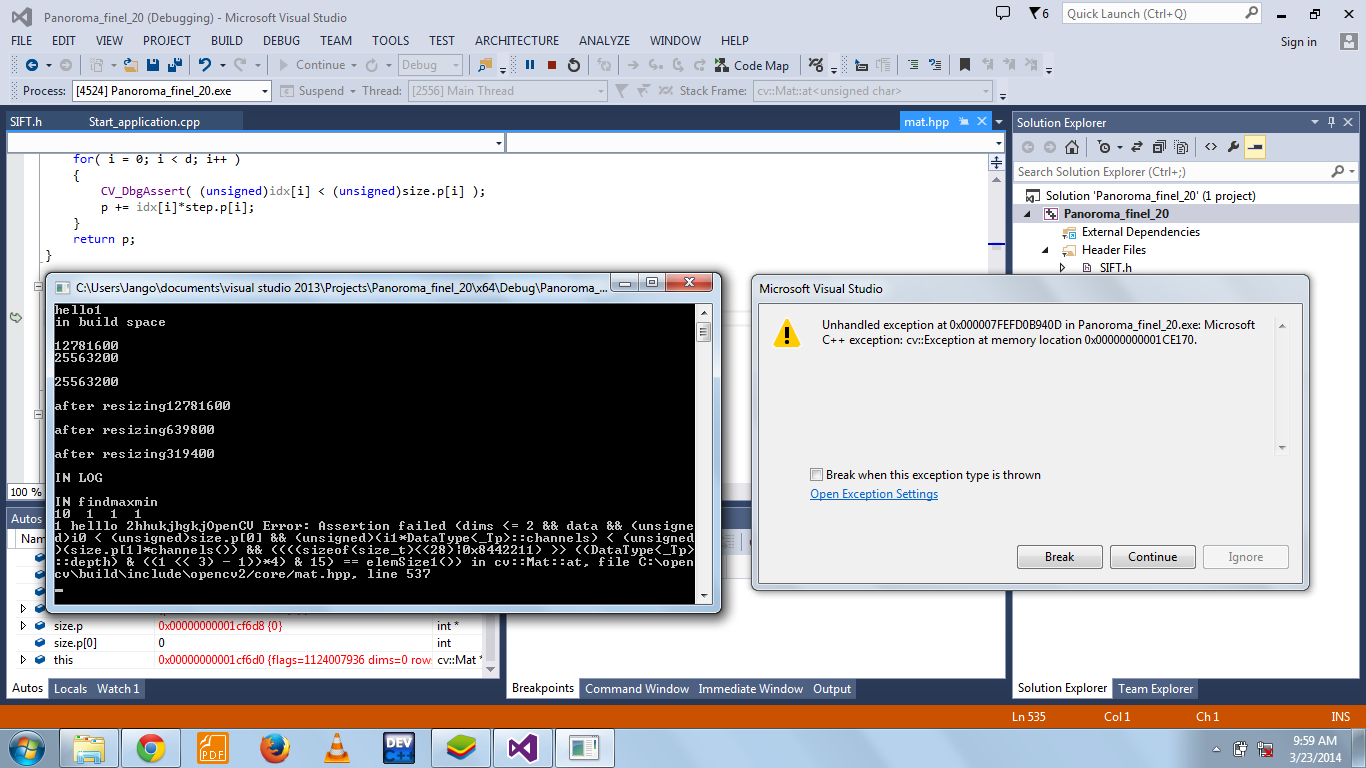
ошибка может быть в функции FindMaxMin () и в этой строке
currentPixel> middle.at<uchar>(yiter, xiter + 1)
Но я не могу это исправить.
Решение
Извините, @ user2396315, я не посещал здесь постоянно.
Проблема в том, что вы не создали «Extrema» с Mat :: create () с правильным размером и типом.
Вы только объявили это «Mat Extrema [4] [2];»
Так что, если еще …
Extrema[i][j - 1].at<uchar>(xiter, yiter) = ??? ;
получит доступ к пустому мату «Extrema [i] [j — 1]».
Вы можете положить
if( Extrema[i][j - 1].empty() == true )
cerr << "Fatal error" << endl ;
перед этим и увидишь.
Всегда проверяйте свой Mat с помощью Mat :: empty (), прежде чем использовать его.
Вот что я имел в виду «Проверьте размер» в этом сообщение. Я не хотел проверять размер массивов.
Помните, что «утверждение не выполнено» обычно означает, что вы передали пустой мат или мат с неправильным размером, как ожидалось.
Другие решения
if (cout << "message" && не похоже на очень хорошую практику. Отделите элементы управления от вывода информации для начала.
Кроме того, вы захотите проверить и убедиться, что ваш xiter а также yiter переменные находятся в пределах, которые вы ожидаете. Исправление этого, скорее всего, решит вашу проблему.