opengl — Как правильно триангулировать многоугольник в переполнении стека
Я работаю над триангуляцией объекта (в конечном счете, я хочу реализовать триангуляцию Делоне, но триангуляция не работает даже до легализации ребер, поэтому я хотел бы сначала сосредоточиться на простой триангуляции). Я включаю соответствующий код ниже. Я реализую метод триангуляции, аналогичный методу, описанному Марком де Бергом «Вычислительная геометрия: алгоритмы и третье издание приложения», среди прочих. Ниже приведен псевдокод (в случае необходимости я его удалю):
Примечание: я изменил псевдокод, создав ограничивающий треугольник вместо использования «лексикографически наивысшей точки P», потому что я не был слишком уверен, как определить p-1 и р-2 как говорится в учебнике, определять их «символически», а не определять точные единицы (вполне возможно, что я просто неправильно понял то, что он пытался сказать, чтобы быть справедливым). Кроме того, легализация не является частью моего кода (пока), поскольку это необходимо для триангуляции Делоне, но я хочу убедиться, что простая триангуляция работает так, как задумано.
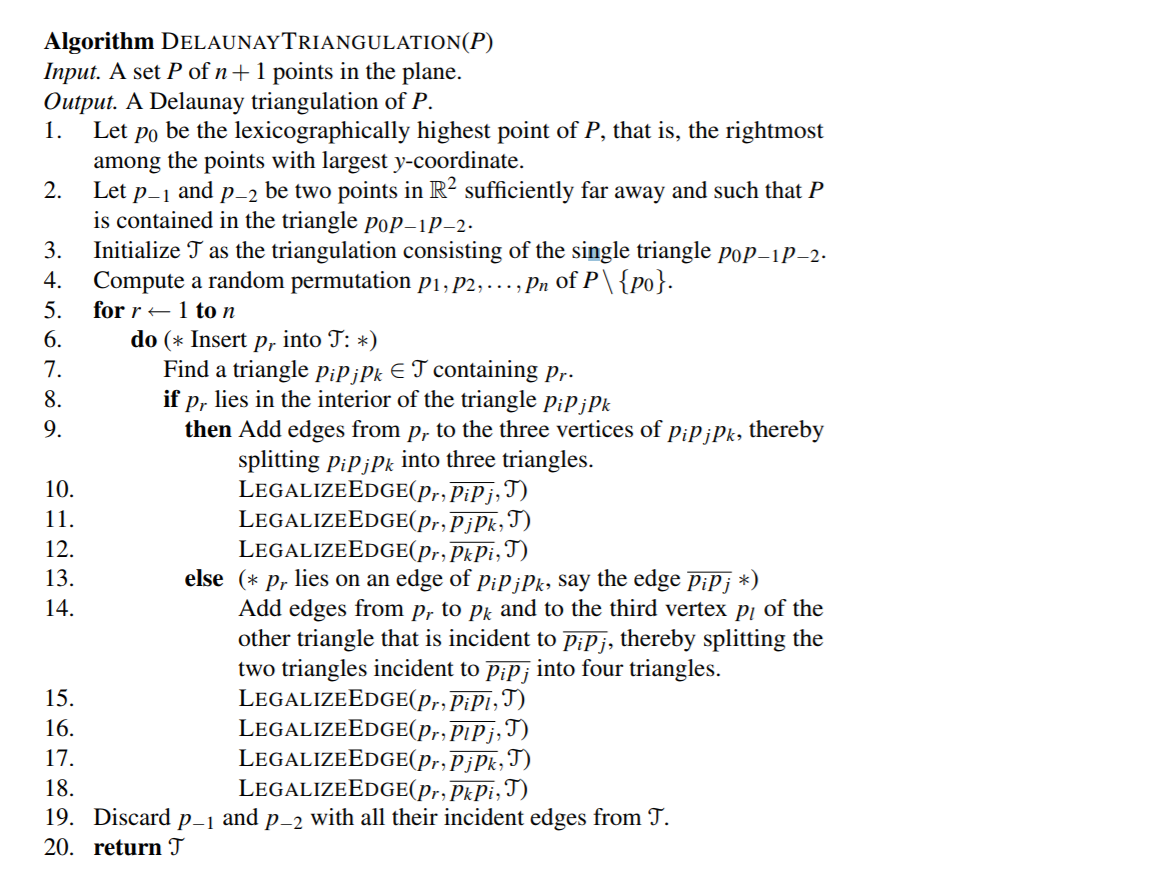
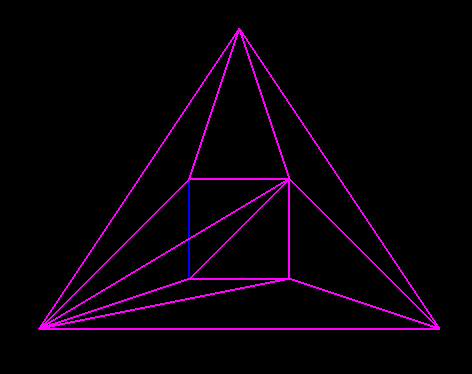
Проблема в том, что я получаю некоторые триангуляции, такие как 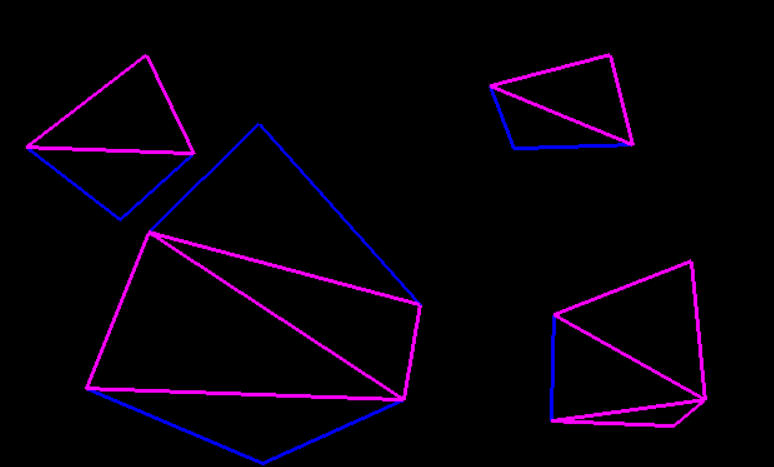 где синие линии от оригинального многоугольника.
где синие линии от оригинального многоугольника.
Некоторые из этих линий не добавляются, потому что они являются частью треугольников точек p0, p1 и p2, которые я не добавляю в методе findSmallest. Тем не менее, если я добавлю эти треугольники, я получу что-то вроде этого: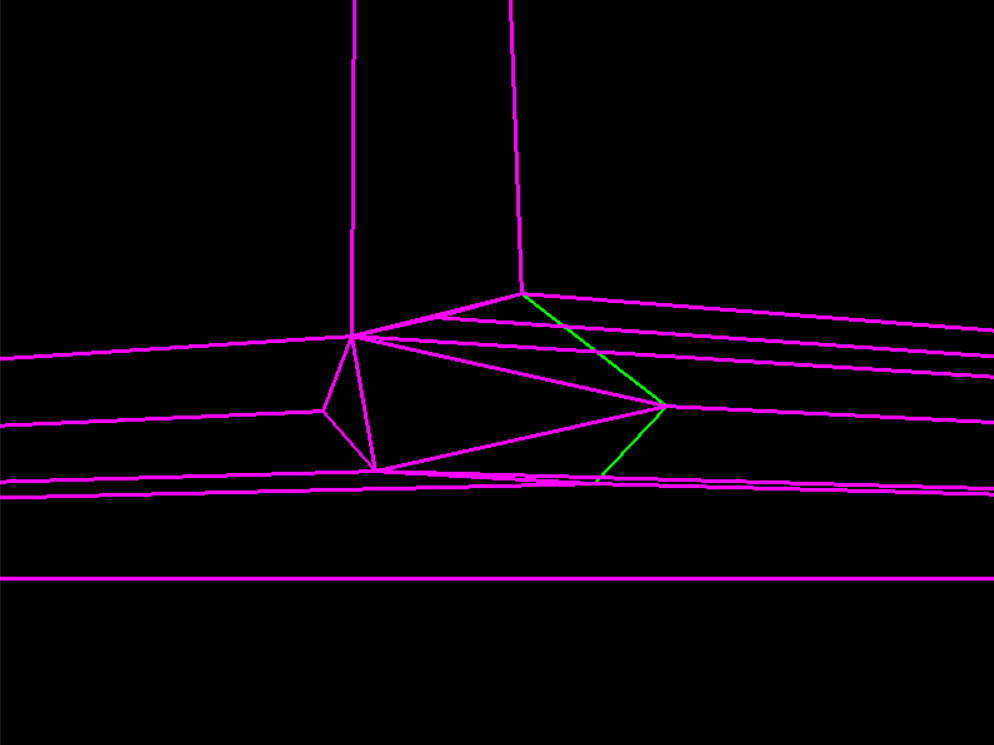 (Обратите внимание, что p0, p1 и p2 выходят за рамки рисунка). Некоторые линии из исходного многоугольника (на этот раз зеленым) до сих пор не добавлены в триангуляцию. Я не уверен, где я иду не так.
(Обратите внимание, что p0, p1 и p2 выходят за рамки рисунка). Некоторые линии из исходного многоугольника (на этот раз зеленым) до сих пор не добавлены в триангуляцию. Я не уверен, где я иду не так.
Я надеюсь, что код понятен, но я собираюсь объяснить некоторые методы / структуры на всякий случай:
TriPoint
является потомком структуры Point.
p0, p1, p2
три точки образуют ограничивающий треугольник вокруг многоугольника. Я поняла от эта почта.
contains(Point p)
возвращает true, если точка находится в треугольнике или на одном из ребер.
findCommonTriangle(TriPoint *a, TriPoint *b, Triangle *t)
возвращает треугольник, падающий на t вдоль ребра ab. (Я не использую Edges для вычисления триангуляции, поэтому я решил получить треугольник инцидента таким образом).
isOnTriangle(Point s)
вызывается для треугольника abc и возвращает 1, если точка находится на ребре ab, 2, если точка находится на ребре bc, 3, если точка находится на ребре cd. Если он находится в треугольнике, он возвращает 0.
Код для самой триангуляции находится ниже:
#include <GL\glew.h>
#include <GL\freeglut.h>
#include <iostream>
#include <array>
#include <vector>
#include "predicates.h"
struct Point {
float x, y;
Point() { }
Point(float a, float b) {
x = a;
y = b;
}
};
struct Triangle;
struct Triangulation;
std::vector<Triangulation *> triangulations;
struct TriPoint : Point {
std::vector<Triangle *> triangles;
TriPoint() { };
int index;
TriPoint(Point a) {
x = a.x;
y = a.y;
}
TriPoint(float x, float y) : Point(x, y) {};
void removeTriangle(Triangle *t) {
for (size_t i = 0; i < triangles.size(); i++) {
if (triangles[i] == t) {
triangles.erase(triangles.begin() + i);
}
}
}
void addTriangle(Triangle *t) {
triangles.push_back(t);
}
};
double pointInLine(Point *a, Point *b, Point *p) {
REAL *A, *B, *P;
A = new REAL[2];
B = new REAL[2];
P = new REAL[2];
A[0] = a->x;
A[1] = a->y;
B[0] = b->x;
B[1] = b->y;
P[0] = p->x;
P[1] = p->y;
double orient = orient2d(A, B, P);
delete(A);
delete(B);
delete(P);
return orient;
}
struct Triangle {
TriPoint *a, *b, *c;
std::vector<Triangle *> children;
Triangle() { };
Triangle(TriPoint *x, TriPoint *y, TriPoint *z) {
a = x;
b = y;
c = z;
orientTri();
x->addTriangle(this);
y->addTriangle(this);
z->addTriangle(this);
}
bool hasChildren() {
return children.size() != 0;
}
void draw() {
glBegin(GL_LINE_STRIP);
glVertex2f(a->x, a->y);
glVertex2f(b->x, b->y);
glVertex2f(c->x, c->y);
glVertex2f(a->x, a->y);
glEnd();
}
bool contains(Point s) {
float as_x = s.x - a->x;
float as_y = s.y - a->y;
bool s_ab = (b->x - a->x)*as_y - (b->y - a->y)*as_x > 0;
if ((c->x - a->x)*as_y - (c->y - a->y)*as_x > 0 == s_ab) return false;
if ((c->x - b->x)*(s.y - b->y) - (c->y - b->y)*(s.x - b->x) > 0 != s_ab) return false;
return true;
}
int isOnTriangle(Point p) {
//Return -1 if outside
//Returns 1 if on AB
//Returns 2 if on BC
//Returns 3 if on CA
//Returns 4 if on B
//Returns 5 if on C
//Returns 6 if on A
double res1 = pointInLine(b, a, &p);
double res2 = pointInLine(c, b, &p);
double res3 = pointInLine(a, c, &p);
/*If triangles are counter-clockwise oriented then a point is inside
the triangle if the three 'res' are < 0, at left of each oriented edge
*/
if (res1 > 0 || res2 > 0 || res3 > 0)
return -1; //outside
if (res1 < 0) {
if (res2 < 0) {
if (res3 < 0) {
return 0; //inside
} else { //res3 == 0
return 3; //on edge3
}
} else { //res2 == 0
if (res3 == 0) {
return 5; //is point shared by edge2 and edge3
}
return 2; //on edge2
}
} else { //res1 == 0
if (res2 == 0) {
return 4; //is point shared by edge1 and edge2
} else if (res3 == 0) {
return 6; //is point shared by edge1 and 3
}
return 1; //on edge 1
}
}
TriPoint *getThirdPoint(TriPoint *x, TriPoint *y) {
if (a != x && a != y)
return a;
if (b != x && b != y)
return b;
return c;
}
bool hasPoint(TriPoint *p) {
return a == p || b == p || c == p;
}
void orientTri() {
REAL *A, *B, *C;
A = new REAL[2];
B = new REAL[2];
C = new REAL[2];
A[0] = a->x;
A[1] = a->y;
B[0] = b->x;
B[1] = b->y;
C[0] = c->x;
C[1] = c->y;
double orientation = orient2d(A, B, C);
if (orientation < 0) {
TriPoint *temp = a;
a = b;
b = temp;
}
delete(A);
delete(B);
delete(C);
}
};
struct Poly {
std::vector<Point> points;
bool selected = false;
};Triangle *findCommonTriangle(TriPoint *a, TriPoint *b, Triangle *t) {
//Returns a triangle shared by a and b incident to t
for (Triangle *aTri : a->triangles) {
for (Triangle *bTri : b->triangles) {
if (aTri == bTri && aTri != t) {
return aTri;
}
}
}
return NULL;
}
struct Triangulation {
std::vector<Point> points;
std::vector<Triangle *> triangles;
float xMin = 9999;
float xMax = 0;
float yMin;
float yMax;
Triangulation() { };
Triangulation(Poly p) {
points = p.points;
sort();
triangulate();
}
void draw() {
for (Triangle *t : triangles) {
t->draw();
}
}
void sort() {
//Sort by y-value in ascending order.
//If y-values are equal, sort by x in ascending order.
for (size_t i = 0; i < points.size() - 1; i++) {
if (points[i].x < xMin) {
xMin = points[i].x;
}
if (points[i].x > xMax) {
xMax = points[i].x;
}
int index = i;
for (size_t j = i; j < points.size(); j++) {
if (points[index].y > points[j].y) {
index = j;
} else if (points[index].y == points[j].y) {
if (points[index].x > points[j].x) {
index = j;
}
}
}
std::swap(points[i], points[index]);
}
yMin = points[0].y;
yMax = points[points.size() - 1].y;
std::random_shuffle(points.begin(), points.end());
}
void triangulate() {
Triangle *root;
float dx = xMax - xMin;
float dy = yMax - yMin;
float deltaMax = std::max(dx, dy);
float midx = (xMin + xMax) / 2.f;
float midy = (yMin + yMax) / 2.f;
TriPoint *p0;
TriPoint *p1;
TriPoint *p2;
p0 = new TriPoint(midx - 2 * deltaMax, midy - deltaMax);
p1 = new TriPoint(midx, midy + 2 * deltaMax);
p2 = new TriPoint(midx + 2 * deltaMax, midy - deltaMax);
p0->index = 0;
p1->index = -1;
p2->index = -2;
root = new Triangle(p0, p1, p2);
for (size_t i = 0; i < points.size(); i++) {
TriPoint *p = new TriPoint(points[i]);
p->index = i + 1;
Triangle *temp = root;
double in;
while (temp->hasChildren()) {
for (size_t j = 0; j < temp->children.size(); j++) {
in = temp->children[j]->isOnTriangle(points[i]);
if (in >= 0) {
temp = temp->children[j];
break;
}
}
}
in = temp->isOnTriangle(points[i]);
if (in > 0 ) { //Boundary
if (in == 1) { //AB
Triangle *other = findCommonTriangle(temp->a, temp->b, temp);
TriPoint *l = other->getThirdPoint(temp->a, temp->b);
l->removeTriangle(other);
temp->a->removeTriangle(other);
temp->b->removeTriangle(other);
temp->a->removeTriangle(temp);
temp->b->removeTriangle(temp);
temp->c->removeTriangle(temp);
Triangle *n1 = new Triangle(temp->a, p, temp->c);
Triangle *n2 = new Triangle(temp->b, temp->c, p);
Triangle *n3 = new Triangle(temp->a, l, p);
Triangle *n4 = new Triangle(temp->b, p, l);
temp->children.push_back(n1);
temp->children.push_back(n2);
other->children.push_back(n3);
other->children.push_back(n4);
} else if (in == 2) { //BC
Triangle *other = findCommonTriangle(temp->b, temp->c, temp);
TriPoint *l = other->getThirdPoint(temp->b, temp->c);
l->removeTriangle(other);
temp->b->removeTriangle(other);
temp->c->removeTriangle(other);
temp->a->removeTriangle(temp);
temp->b->removeTriangle(temp);
temp->c->removeTriangle(temp);
Triangle *n1 = new Triangle(temp->a, p, temp->c);
Triangle *n2 = new Triangle(temp->b, temp->a, p);
Triangle *n3 = new Triangle(temp->c, p, l);
Triangle *n4 = new Triangle(temp->b, l, p);
temp->children.push_back(n1);
temp->children.push_back(n2);
other->children.push_back(n3);
other->children.push_back(n4);
} else if (in == 3) { //CA
Triangle *other = findCommonTriangle(temp->a, temp->c, temp);
TriPoint *l = other->getThirdPoint(temp->a, temp->c);
l->removeTriangle(other);
temp->a->removeTriangle(other);
temp->c->removeTriangle(other);
temp->a->removeTriangle(temp);
temp->b->removeTriangle(temp);
temp->c->removeTriangle(temp);
Triangle *n1 = new Triangle(temp->b, temp->c, p);
Triangle *n2 = new Triangle(temp->a, temp->b, p);
Triangle *n3 = new Triangle(temp->c, l, p);
Triangle *n4 = new Triangle(temp->a, p, l);
temp->children.push_back(n1);
temp->children.push_back(n2);
other->children.push_back(n3);
other->children.push_back(n4);
}
} else { //Point is inside of triangle
Triangle *t1 = new Triangle(temp->a, temp->b, p);
Triangle *t2 = new Triangle(temp->b, temp->c, p);
Triangle *t3 = new Triangle(temp->c, temp->a, p);
temp->a->removeTriangle(temp);
temp->b->removeTriangle(temp);
temp->c->removeTriangle(temp);
temp->children.push_back(t1);
temp->children.push_back(t2);
temp->children.push_back(t3);
}
} //Triangulation done
findSmallest(root, p0, p1, p2);
triangulations.push_back(this);
}
void findSmallest(Triangle *root, TriPoint *p0, TriPoint *p1, TriPoint *p2) {
bool include = true; //Controls drawing triangles with p0, p1, and p2
if (root->hasChildren()) {
for (Triangle *t : root->children) {
findSmallest(t, p0, p1, p2);
}
} else {
int i0 = root->hasPoint(p0);
int i1 = root->hasPoint(p1);
int i2 = root->hasPoint(p2);
if ((!i0 && !i1 && !i2) || include) {
triangles.push_back(root);
}
}
}
};
Poly polygon;
void changeViewPort(int w, int h)
{
glViewport(0, 0, w, h);
glMatrixMode(GL_PROJECTION);
glLoadIdentity();
glOrtho(0, glutGet(GLUT_WINDOW_WIDTH), 0, glutGet(GLUT_WINDOW_HEIGHT), -1, 1);
glMatrixMode(GL_MODELVIEW);
glLoadIdentity();
glTranslatef(0.375, 0.375, 0.0);
}
void render() {
glClear(GL_COLOR_BUFFER_BIT);
glLineWidth(2.5);
changeViewPort(glutGet(GLUT_WINDOW_WIDTH), glutGet(GLUT_WINDOW_HEIGHT));
glColor3f(0, 0, 1); //Blue
glBegin(GL_LINE_STRIP);
for (size_t j = 0; j < polygon.points.size(); j++) {
std::vector<Point> ps = polygon.points;
Point p1 = ps[j];
glVertex2i(p1.x, p1.y);
}
glVertex2i(polygon.points[0].x, polygon.points[0].y);
glEnd();
glColor3f(1, 0, 1);
for (Triangulation *t : triangulations) {
t->draw();
}
glutSwapBuffers();
}
int main(int argc, char* argv[]) {
glutInit(&argc, argv);
glutInitDisplayMode(GLUT_DOUBLE | GLUT_RGBA | GLUT_DEPTH);
glutInitWindowSize(800, 600);
glutCreateWindow("Stack Overflow Question");
glutReshapeFunc(changeViewPort);
glutDisplayFunc(render);
exactinit();
polygon.points.push_back(*new Point(300.0f, 300.0f));
polygon.points.push_back(*new Point(300.0f, 400.0f));
polygon.points.push_back(*new Point(400.0f, 400.0f));
polygon.points.push_back(*new Point(400.0f, 300.0f));
Triangulation t = *(new Triangulation(polygon));
glutMainLoop();
return 0;
}
Примечание: предикаты и предикаты были созданы с использованием кода из Вот.
Решение
Ваш код довольно неоптимальный, но сейчас это не имеет значения (вы учитесь, верно?). Я сосредоточусь на вопросах триангуляции.
Отредактировано: вы инициализируете yMin а также yMax Члены Triangulation в sort() и использовать их позже для «большого вмещающего» треугольника. Если вы решите не использовать «sort ()», вы будете использовать инициализированные значения. Установите некоторые значения по умолчанию.
Сортировка точек не нужна для построения триангуляции. Вы используете его только для того, чтобы найти ВВ, слишком много усилий, а в конце перетасовать их, опять же слишком много усилий.
Основная проблема (в вашем первом посте, до того, как вы его отредактировали) я вижу способ найти точку внутри треугольника, на его границе или за ее пределами.
Triangle::isOnTriangle() это ужасно Вы рассчитываете несколько crossproducts и возвращаемое значение «0» (внутри треугольника) ни одно из них не равно «0».
Вы можете утверждать, что заранее знаете, что точка зрения находится не снаружи, потому что вы проверяли ее раньше Triangle::contains(), но эта функция также ужасна, не так много, хотя.
Лучший (или, по крайней мере, самый простой и наиболее используемый) способ найти относительное положение точки на линии — это
res = (y2 - y1)*(px - x1) - (x2 - x1)*(py - y1)
res является положительным значением, если {px,py} находится справа от {x1,y1} to {x2,y2} линия. Отрицательный, если слева, и ноль, если он на линии.
Две важные вещи здесь:
- а) Поменять местами направление (то есть линия
{x2,y2} to {x1,y1}) меняет знакres, - б) сказать, если
resдействительно ноль не легко из-за числовых проблем, как с любым другим представлением с плавающей точностью.
Для а) вы должны быть уверены, что все треугольники имеют одинаковую ориентацию (или первое выражение будет использовано неправильно). Вы можете проявлять особую осторожность в отношении порядка точек, которые вы передаете в треугольник ctor. Или вы можете добавить функцию «orientTri», которая устанавливает их. В настоящее время ваш ограничительный треугольник расположен по часовой стрелке. Наиболее распространенный порядок (также используемый в OpenGL) против часовой стрелки; но вы можете выбрать тот, который вам нравится, просто знайте об этом.
Для б) сравнение поплавка с ‘0’ не очень хорошая идея. В некоторых сценариях вы можете использовать if std::abs(value) < someEpsilon, Но особенно с триангуляциями этого недостаточно. Классные примеры
Проблемы робастности в геометрических вычислениях очень хорошо объясняет, почему ваши расчеты должны быть «надежными». Шевчук Робаст Предикаты это очень хорошее решение.
После того, как вы решите эти два вопроса, проблема «точка в треугольнике» может быть решена так:
double pointInLine(line *L, point *p)
{
//returns positive, negative or exactly zero value
return robustCalculus(L, p);
}
int pointInTriangle(triangle *t, point *p)
{
double res1 = pointInLine(t->edge1, p);
double res2 = pointInLine(t->edge2, p);
double res3 = pointInLine(t->edge3, p);
/*If triangles are counter-clockwise oriented then a point is inside
the triangle if the three 'res' are < 0, at left of each oriented edge
*/
if ( res1 > 0 || res2 > 0 || res3 > 0 )
return -1; //outside
if ( res1 < 0 )
if ( res2 < 0 )
if ( res3 < 0 )
return 0; //inside
else //res3 == 0
return 3; //on edge3
else //res2 == 0
{ if ( res3 == 0 )
return 5; //is point shared by edge2 and edge3
return 2; //on edge2
}
else
... test for other edges or points
}
Для остальной части процесса триангуляции несколько советов:
Поскольку вам нужна триангуляция Делоне, каждый раз, когда вы добавляете новую точку, вы должны проверять условие «inCircle» (нет другого треугольника, окружность которого содержит эту новую точку). Это можно сделать, как показано в книге или в ссылках, которые я разместил. Опять надо крепкий предикаты.
Перестановка порядка вставки точек может улучшить производительность для определения местоположения треугольника, в котором находится новая точка. Это может быть правдой в зависимости от метода, используемого для определения местоположения детали. Вы используете иерархию треугольников, поэтому, если данные отсортированы или нет, это не влияет.
Кстати, поддержание иерархической структуры для каждого добавленного / удаленного / измененного треугольника обходится дорого в ЦП и ОЗУ. Возможно, вы найдете другие способы позже, когда получите опыт работы с сеткой.
Без иерархии, метод «ходьбы до точки» (Google для него) кажется быстрее с рандомизированным вводом. Но использование кеша (последний построенный треугольник) гораздо эффективнее.
Удачи с сеткой. Трудно начать и отладить, дьявол живет в деталях.
Другие решения
Помимо вопросов, уже указанных в ответе Ripi2, я хотел бы предложить следующее:
1. random_shuffle:
Я вижу, вы не инициализируете генератор случайных чисел (вызывая srand в вашей основной функции). Это означает, что вы всегда будете использовать одну и ту же псевдослучайную последовательность, поэтому выполнение программы несколько раз приведет к одному и тому же результату. Я проверил ваш код, и перетасовка действительно влияет на код. После правильной инициализации генератора случайных чисел вы можете видеть, что триангуляция меняется каждый раз, образуя разные треугольники.
2. сравнения:
В вашем коде вы сравниваете точки и треугольники, сравнивая указатели. Это означает, например, что две точки будут равны тогда и только тогда, когда они точно одинаковы в памяти. Две точечные структуры с одинаковыми координатами будут считаться разными точками. Я не уверен, что это то, что вы хотите получить или нет, поэтому я бы посоветовал подумать об этом.
3. треугольник вокруг многоугольника:
Помимо жестко закодированного значения (20), я не понимаю, почему этот код должен производить правильную триангуляцию. Вы создаете несколько треугольников над многоугольником, но они все разделите одну из этих трех фиксированных точек за пределами треугольника.
Вот снимок, сделанный для уменьшения жестко закодированного параметра до 2, чтобы уместить все треугольники в области просмотра:
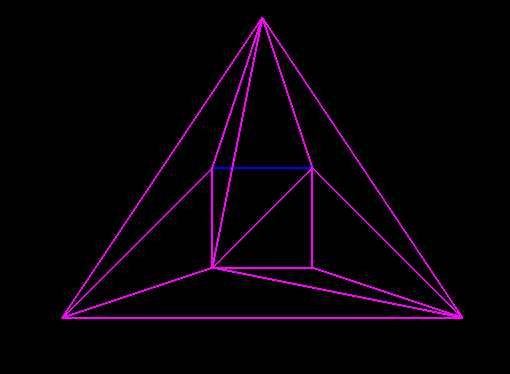
Тот же код, другой порядок точек (после инициализации srand со временем (0)):
У меня нет доступа к псевдокоду алгоритма, но я бы предложил отредактировать ваш ответ, чтобы кратко описать его, просто для ясности.
Удачи в вашей реализации 🙂