OpenCV — RobustMatcher с использованием findHomography
Я реализовал Robust matcher, найденный в Интернете, на основе различных тестов: теста на симметрию, теста Ratio и теста RANSAC. Это работает хорошо.
Я использовал тогда findHomography чтобы иметь хорошие матчи.
Вот код:
RobustMatcher::RobustMatcher() : ratio(0.65f), refineF(true),confidence(0.99), distance(3.0) {
detector = new cv::SurfFeatureDetector(400); //Better than ORB
//detector = new cv::SiftFeatureDetector; //Better than ORB
//extractor= new cv::OrbDescriptorExtractor();
//extractor= new cv::SiftDescriptorExtractor;
extractor= new cv::SurfDescriptorExtractor;
// matcher= new cv::FlannBasedMatcher;
matcher= new cv::BFMatcher();
}
// Clear matches for which NN ratio is > than threshold
// return the number of removed points
// (corresponding entries being cleared,
// i.e. size will be 0)
int RobustMatcher::ratioTest(std::vector<std::vector<cv::DMatch> >
&matches) {
int removed=0;
// for all matches
for (std::vector<std::vector<cv::DMatch> >::iterator
matchIterator= matches.begin();
matchIterator!= matches.end(); ++matchIterator) {
// if 2 NN has been identified
if (matchIterator->size() > 1) {
// check distance ratio
if ((*matchIterator)[0].distance/
(*matchIterator)[1].distance > ratio) {
matchIterator->clear(); // remove match
removed++;
}
} else { // does not have 2 neighbours
matchIterator->clear(); // remove match
removed++;
}
}
return removed;
}
// Insert symmetrical matches in symMatches vector
void RobustMatcher::symmetryTest(
const std::vector<std::vector<cv::DMatch> >& matches1,
const std::vector<std::vector<cv::DMatch> >& matches2,
std::vector<cv::DMatch>& symMatches) {
// for all matches image 1 -> image 2
for (std::vector<std::vector<cv::DMatch> >::
const_iterator matchIterator1= matches1.begin();
matchIterator1!= matches1.end(); ++matchIterator1) {
// ignore deleted matches
if (matchIterator1->size() < 2)
continue;
// for all matches image 2 -> image 1
for (std::vector<std::vector<cv::DMatch> >::
const_iterator matchIterator2= matches2.begin();
matchIterator2!= matches2.end();
++matchIterator2) {
// ignore deleted matches
if (matchIterator2->size() < 2)
continue;
// Match symmetry test
if ((*matchIterator1)[0].queryIdx ==
(*matchIterator2)[0].trainIdx &&
(*matchIterator2)[0].queryIdx ==
(*matchIterator1)[0].trainIdx) {
// add symmetrical match
symMatches.push_back(
cv::DMatch((*matchIterator1)[0].queryIdx,
(*matchIterator1)[0].trainIdx,
(*matchIterator1)[0].distance));
break; // next match in image 1 -> image 2
}
}
}
}
// Identify good matches using RANSAC
// Return fundemental matrix
cv::Mat RobustMatcher::ransacTest(const std::vector<cv::DMatch>& matches,const std::vector<cv::KeyPoint>& keypoints1,
const std::vector<cv::KeyPoint>& keypoints2,
std::vector<cv::DMatch>& outMatches) {
// Convert keypoints into Point2f
std::vector<cv::Point2f> points1, points2;
cv::Mat fundemental;
for (std::vector<cv::DMatch>::const_iterator it= matches.begin();it!= matches.end(); ++it) {
// Get the position of left keypoints
float x= keypoints1[it->queryIdx].pt.x;
float y= keypoints1[it->queryIdx].pt.y;
points1.push_back(cv::Point2f(x,y));
// Get the position of right keypoints
x= keypoints2[it->trainIdx].pt.x;
y= keypoints2[it->trainIdx].pt.y;
points2.push_back(cv::Point2f(x,y));
}
// Compute F matrix using RANSAC
std::vector<uchar> inliers(points1.size(),0);
if (points1.size()>0&&points2.size()>0){
cv::Mat fundemental= cv::findFundamentalMat(
cv::Mat(points1),cv::Mat(points2), // matching points
inliers, // match status (inlier or outlier)
CV_FM_RANSAC, // RANSAC method
distance, // distance to epipolar line
confidence); // confidence probability
// extract the surviving (inliers) matches
std::vector<uchar>::const_iterator itIn= inliers.begin();
std::vector<cv::DMatch>::const_iterator itM= matches.begin();
// for all matches
for ( ;itIn!= inliers.end(); ++itIn, ++itM) {
if (*itIn) { // it is a valid match
outMatches.push_back(*itM);
}
}
if (refineF) {
// The F matrix will be recomputed with
// all accepted matches
// Convert keypoints into Point2f
// for final F computation
points1.clear();
points2.clear();
for (std::vector<cv::DMatch>::const_iterator it= outMatches.begin();it!= outMatches.end(); ++it) {
// Get the position of left keypoints
float x= keypoints1[it->queryIdx].pt.x;
float y= keypoints1[it->queryIdx].pt.y;
points1.push_back(cv::Point2f(x,y));
// Get the position of right keypoints
x= keypoints2[it->trainIdx].pt.x;
y= keypoints2[it->trainIdx].pt.y;
points2.push_back(cv::Point2f(x,y));
}
// Compute 8-point F from all accepted matches
if (points1.size()>0&&points2.size()>0){
fundemental= cv::findFundamentalMat(cv::Mat(points1),cv::Mat(points2), // matches
CV_FM_8POINT); // 8-point method
}
}
}
return fundemental;
}
// Match feature points using symmetry test and RANSAC
// returns fundemental matrix
cv::Mat RobustMatcher::match(cv::Mat& image1,
cv::Mat& image2, // input images
// output matches and keypoints
std::vector<cv::DMatch>& matches,
std::vector<cv::KeyPoint>& keypoints1,
std::vector<cv::KeyPoint>& keypoints2) {
if (!matches.empty()){
matches.erase(matches.begin(),matches.end());
}
// 1a. Detection of the SIFT features
detector->detect(image1,keypoints1);
detector->detect(image2,keypoints2);
// 1b. Extraction of the SIFT descriptors
/*cv::Mat img_keypoints;
cv::Mat img_keypoints2;
drawKeypoints( image1, keypoints1, img_keypoints, Scalar::all(-1), DrawMatchesFlags::DEFAULT );
drawKeypoints( image2, keypoints2, img_keypoints2, Scalar::all(-1), DrawMatchesFlags::DEFAULT );
//-- Show detected (drawn) keypoints
//cv::imshow("Result keypoints detected", img_keypoints);
// cv::imshow("Result keypoints detected", img_keypoints2);
cv::waitKey(5000);*/
cv::Mat descriptors1, descriptors2;
extractor->compute(image1,keypoints1,descriptors1);
extractor->compute(image2,keypoints2,descriptors2);
// 2. Match the two image descriptors
// Construction of the matcher
//cv::BruteForceMatcher<cv::L2<float>> matcher;
// from image 1 to image 2
// based on k nearest neighbours (with k=2)
std::vector<std::vector<cv::DMatch> > matches1;
matcher->knnMatch(descriptors1,descriptors2,
matches1, // vector of matches (up to 2 per entry)
2); // return 2 nearest neighbours
// from image 2 to image 1
// based on k nearest neighbours (with k=2)
std::vector<std::vector<cv::DMatch> > matches2;
matcher->knnMatch(descriptors2,descriptors1,
matches2, // vector of matches (up to 2 per entry)
2); // return 2 nearest neighbours
// 3. Remove matches for which NN ratio is
// > than threshold
// clean image 1 -> image 2 matches
int removed= ratioTest(matches1);
// clean image 2 -> image 1 matches
removed= ratioTest(matches2);
// 4. Remove non-symmetrical matches
std::vector<cv::DMatch> symMatches;
symmetryTest(matches1,matches2,symMatches);
// 5. Validate matches using RANSAC
cv::Mat fundemental= ransacTest(symMatches,
keypoints1, keypoints2, matches);
// return the found fundemental matrix
return fundemental;
}cv::Mat img_matches;
drawMatches(image1, keypoints_img1,image2, keypoints_img2,
matches, img_matches, Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS );
std::cout << "Number of good matching " << (int)matches.size() << "\n" << endl;
if ((int)matches.size() > 5 ){
Debug::info("Good matching !");
}
//-- Localize the object
std::vector<Point2f> obj;
std::vector<Point2f> scene;
for( int i = 0; i < matches.size(); i++ )
{
//-- Get the keypoints from the good matches
obj.push_back( keypoints_img1[ matches[i].queryIdx ].pt );
scene.push_back( keypoints_img2[matches[i].trainIdx ].pt );
}
cv::Mat arrayRansac;
std::vector<uchar> inliers(obj.size(),0);
Mat H = findHomography( obj, scene, CV_RANSAC,3,inliers);//-- Get the corners from the image_1 ( the object to be "detected" )
std::vector<Point2f> obj_corners(4);
obj_corners[0] = cvPoint(0,0); obj_corners[1] = cvPoint( image1.cols, 0 );
obj_corners[2] = cvPoint( image1.cols, image1.rows ); obj_corners[3] = cvPoint( 0, image1.rows );
std::vector<Point2f> scene_corners(4);perspectiveTransform( obj_corners, scene_corners, H);//-- Draw lines between the corners (the mapped object in the scene - image_2 )
line( img_matches, scene_corners[0] + Point2f( image1.cols, 0), scene_corners[1] + Point2f( image1.cols, 0), Scalar(0, 255, 0), 4 );
line( img_matches, scene_corners[1] + Point2f( image1.cols, 0), scene_corners[2] + Point2f( image1.cols, 0), Scalar( 0, 255, 0), 4 );
line( img_matches, scene_corners[2] + Point2f( image1.cols, 0), scene_corners[3] + Point2f( image1.cols, 0), Scalar( 0, 255, 0), 4 );
line( img_matches, scene_corners[3] + Point2f( image1.cols, 0), scene_corners[0] + Point2f( image1.cols, 0), Scalar( 0, 255, 0), 4 );}
</pre><code>
У меня есть такие результаты (гомография это хорошо):

Но я не понимаю, почему для некоторых из моих результатов, где матч хороший, у меня есть такие результаты (гомография не кажется хорошей):
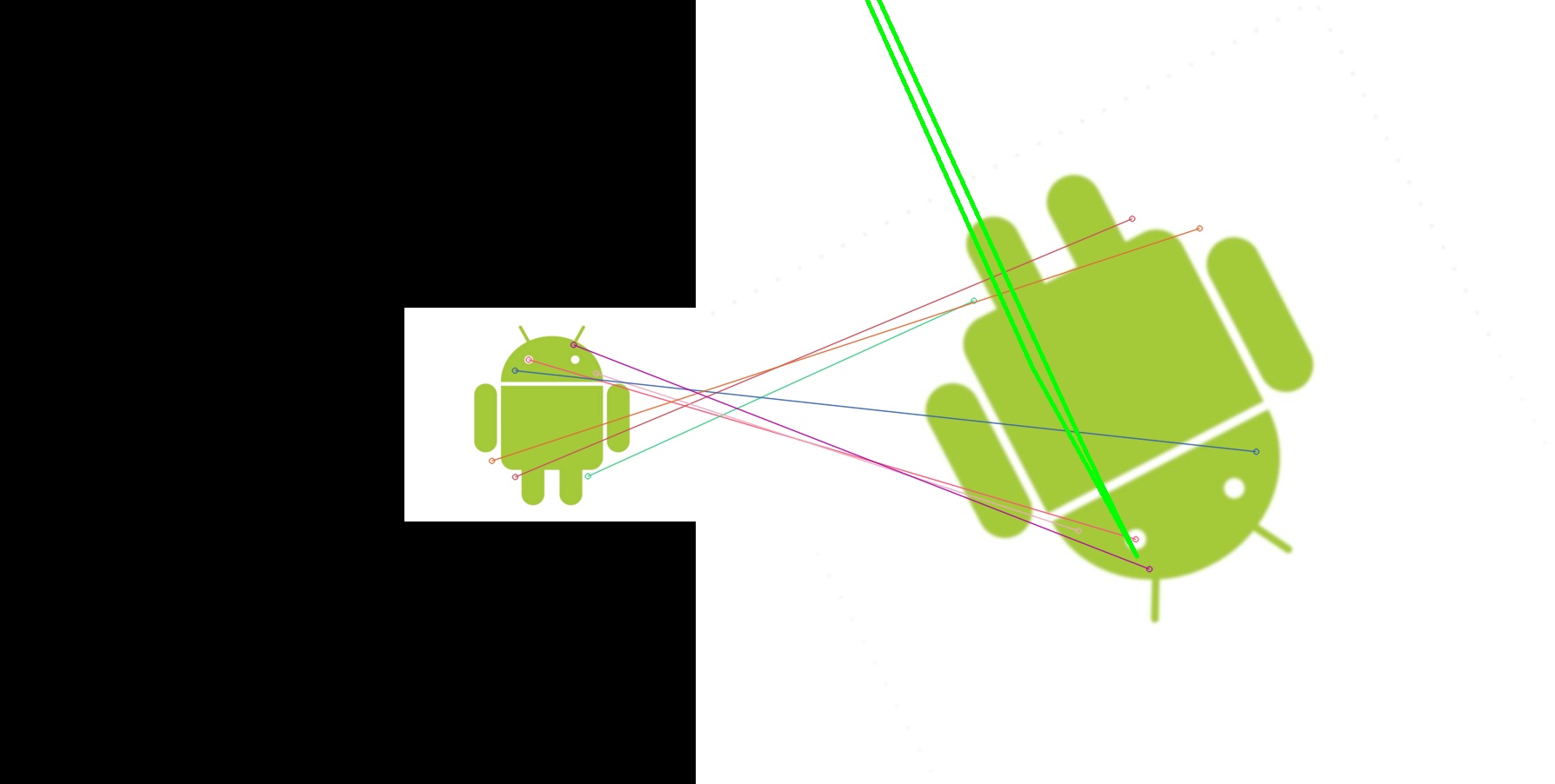
Может кто-нибудь объяснить мне? Может быть, я должен настроить параметры? Но если я уменьшу ограничения (например, увеличу соотношение) вместо того, чтобы не было совпадения между двумя изображениями (это хорошо), у меня будет много совпадений … И я не хочу. Кроме того, гомография не работает вообще (у меня есть зеленая линия только как выше).
И наоборот, мой надежный сопоставитель работает (тоже) хорошо, то есть, что для разностных изображений одинаковых (только повернутых, разностных масштабов и т. Д.), Это нормально работает, но когда у меня два одинаковых изображения, у меня нет совпадений вообще …

Так что я не умею делать хорошие вычисления. Я новичок Надежный сопоставитель работает хорошо, но для точно такого же изображения, но для двух похожих изображений, как указано выше, он не работает, и это проблема.
Может быть, я на неправильном пути.
Прежде чем опубликовать это сообщение, я, конечно, много читал о стеке, но не нашел ответа. (Например Вот)
Решение
Это связано с тем, как работают дескрипторы SURF, см. http://docs.opencv.org/trunk/doc/py_tutorials/py_feature2d/py_surf_intro/py_surf_intro.html
В основном с Droid изображение в основном ровное, и трудно найти ключевые точки, которые не бывают двусмысленными. В Nike форма такая же, но соотношение интенсивностей в дескрипторах совершенно иное: представьте, что слева в центре дескриптора будет 0 и справа 1. Даже если вы нормализуете интенсивность изображений, вы не собираешься иметь матч.
Если ваша цель — просто сопоставить логотипы, я предлагаю вам взглянуть на алгоритмы обнаружения ребер, например: http://docs.opencv.org/doc/tutorials/imgproc/imgtrans/canny_detector/canny_detector.html
Другие решения