OpenCV нежелательное смешение цветов
Я написал короткую программу, которая демонстрирует обнаружение линии связи с использованием OpenCV.
На последнем шаге код берет исходное размытое изображение в оттенках серого, накладывает результаты обнаружения четких краев и затем накладывает обнаруженные линии грубого преобразования.
Черные линии отображаются в виде сплошных красных (R = 255) линий размером 3 пикселя, однако при их наложении изображение ниже почему-то просвечивает. Пример ниже.
Исходное изображение:
Размытое изображение в оттенках серого с краями Canny + Hough Lines Overlayed: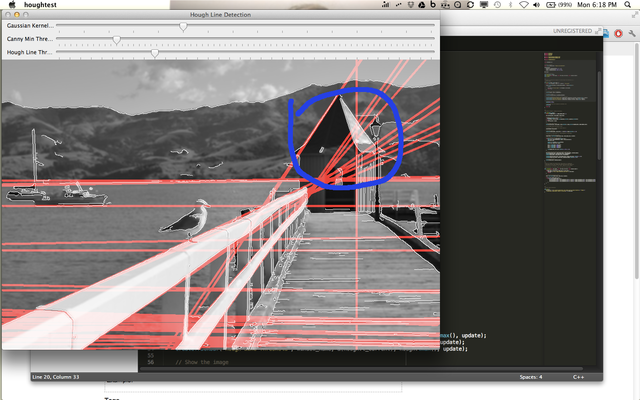
Увеличено в сегменте:
Как можно видеть, изображение в оттенках серого проходит через (по-видимому) сплошной красный цвет. Почему это?
Полный код ниже:
houghtest.cpp
#include <stdlib.h>
#include <iostream>
#include <stdio.h>
#include "opencv2/imgproc/imgproc.hpp"#include "opencv2/highgui/highgui.hpp"
#include "toolbarconfig.h"
using namespace cv;// Global variables
const char* window_name = "Hough Line Detection";
ToolbarConfig
gaussian = ToolbarConfig(0, 15, 1, 6),
canny = ToolbarConfig(20, 150, 2, 40),
hough = ToolbarConfig(50, 400, 10, 200);
Mat input;
// Function prototypes
void update(int, void*);
void chromakey(const Mat under, const Mat over, Mat *dst, const Scalar& color);
void help();/**
* Creates an interactive example of running hough line detection on a
* sample image
*/
int main( int argc, char** argv ) {
const char* filename = argc >= 2 ? argv[1] : "pic1.png";
input = imread(filename, CV_LOAD_IMAGE_COLOR); if(input.empty()) {
help();
std::cout << "Can not open " << filename << std::endl;
return -1;
}
// Convert the image to grayscale
cvtColor(input, input, CV_BGR2GRAY);
// Create a window
namedWindow(window_name, CV_WINDOW_AUTOSIZE);
// Create trackbars for the user to enter thresholds
createTrackbar("Gaussian Kernel Size", window_name, &(gaussian.t_current), gaussian.tmax(), update);
createTrackbar("Canny Min Threshold", window_name, &(canny.t_current), canny.tmax(), update);
createTrackbar("Hough Line Threshold", window_name, &(hough.t_current), hough.tmax(), update);
// Show the image
update(NULL, NULL);
// Wait until user exit program by pressing a key
waitKey(0);
return 0;
}/**
* Trackbar callback - updates the display
*/
void update(int, void*) {
const int CANNY_RATIO = 3, CANNY_KERNEL_SIZE = 3;
Mat blurred_input, canny_edges, hough_lines;
// Reduce noise with a gaussian kernel
if(gaussian.current() != 0) {
blur(input, blurred_input, Size(gaussian.current(), gaussian.current()));
} else {
blurred_input = input;
}
// Run Canny edge detector
Canny(blurred_input, canny_edges, canny.current(), canny.current()*CANNY_RATIO, CANNY_KERNEL_SIZE);
// ==== Begin Hough line detector phase
// Create a vector to store the located lines in
vector<Vec2f> line_vector;
// Run the transform
HoughLines(canny_edges, line_vector, 1, CV_PI/180, hough.current(), 0, 0);
//std::cout << lines.size() << " lines detected" << std::endl;
// Prepare the hough_lines image
hough_lines = Mat::zeros(canny_edges.rows, canny_edges.cols, CV_8UC3);
// Draw detected lines into an image
for(size_t i = 0; i < line_vector.size(); i++) {
float rho = line_vector[i][0], theta = line_vector[i][1];
Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a*rho, y0 = b*rho;
pt1.x = cvRound(x0 + 1000*(-b));
pt1.y = cvRound(y0 + 1000*(a));
pt2.x = cvRound(x0 - 1000*(-b));
pt2.y = cvRound(y0 - 1000*(a));
line(hough_lines, pt1, pt2, Scalar(0, 0, 255), 3, 0);
}
// Overlay the hough lines onto the original blurred image
Mat blurred_input_color, canny_edges_color, input_with_canny, combined_images;
cvtColor(blurred_input, blurred_input_color, CV_GRAY2BGR);
cvtColor(canny_edges, canny_edges_color, CV_GRAY2BGR);
chromakey(blurred_input_color, canny_edges_color, &input_with_canny, Scalar(0, 0, 0));
chromakey(input_with_canny, hough_lines, &combined_images, Scalar(0, 0, 0));
// Display the result
imshow(window_name, combined_images);
}
/**
* Takes two images and overlays them, using color as a chroma-key
* Any pixels in the 'over' image that match the given color value will
* effectively be transparent - the 'under' image will show through
*
* @precondition: All passed images must first be in BGR format
*/
void chromakey(const Mat under, const Mat over, Mat *dst, const Scalar& color) {
// Mats must be the same size
if(under.rows != over.rows || under.cols != over.cols) {
std::cout << "Error, image dimensions must match" << std::endl;
return;
}
// Create the destination matrix
*dst = Mat::zeros(under.rows, under.cols, CV_8UC3);
for(int y=0; y<under.rows; y++) {
for(int x=0; x<under.cols; x++) {
dst->at<Vec3b>(y,x)[0] = over.at<Vec3b>(y,x)[0] == color[0] ? under.at<Vec3b>(y,x)[0] : over.at<Vec3b>(y,x)[0];
dst->at<Vec3b>(y,x)[1] = over.at<Vec3b>(y,x)[1] == color[1] ? under.at<Vec3b>(y,x)[1] : over.at<Vec3b>(y,x)[1];
dst->at<Vec3b>(y,x)[2] = over.at<Vec3b>(y,x)[2] == color[2] ? under.at<Vec3b>(y,x)[2] : over.at<Vec3b>(y,x)[2];
}
}
}/**
* Prints usage information
*/
void help() {
std::cout << "\nThis program demonstrates line finding with the Hough transform.\n" "Usage:\n""./houghlines <image_name>, Default is pic1.png\n" << std::endl;
}
toolbarconfig.h
#ifndef TOOLBARCONFIG_H
#define TOOLBARCONFIG_H
class ToolbarConfig {
public:
ToolbarConfig(int min, int max, int stepsize, int current);
int w2t(int world_value);
int t2w(int toolbar_value);
int current();
int tmax();
int tmin();
int min;
int max;
int stepsize;
int t_current;
};
#endif
toolbarconfig.cpp
#include <algorithm>
#include "toolbarconfig.h"
ToolbarConfig::ToolbarConfig(int min, int max, int stepsize, int current) {
this->min = min;
this->max = max;
this->stepsize = stepsize;
this->t_current = this->w2t(current);
}
int ToolbarConfig::w2t(int world_value) {
return int((std::min(std::max(world_value, min), max) - min) / stepsize);
}
int ToolbarConfig::t2w(int toolbar_value) {
return toolbar_value * stepsize + min;
}
int ToolbarConfig::current() {
return t2w(t_current);
}
int ToolbarConfig::tmax() {
return w2t(max);
}
int ToolbarConfig::tmin() {
return w2t(min);
}
Рад также поставить мой Makefile, если требуется.
Заранее спасибо.
Решение
Ошибка должна быть здесь:
dst->at<Vec3b>(y,x)[0] = over.at<Vec3b>(y,x)[0] == color[0] ? under.at<Vec3b>(y,x)[0] : over.at<Vec3b>(y,x)[0];
dst->at<Vec3b>(y,x)[1] = over.at<Vec3b>(y,x)[1] == color[1] ? under.at<Vec3b>(y,x)[1] : over.at<Vec3b>(y,x)[1];
dst->at<Vec3b>(y,x)[2] = over.at<Vec3b>(y,x)[2] == color[2] ? under.at<Vec3b>(y,x)[2] : over.at<Vec3b>(y,x)[2];
При первом звонке
chromakey(blurred_input_color, canny_edges_color, &input_with_canny, Scalar(0, 0, 0));
canny_edges_colorЗначение белого пикселя (255, 255, 255), поэтому в приведенных выше сравнениях вы получите over значения для каждого канала, поэтому цвет пикселя будет (255, 255, 255), и изображение будет отображаться правильно.
Однако во втором случае:
chromakey(input_with_canny, hough_lines, &combined_images, Scalar(0, 0, 0));
ваш hugh_lines красные пиксели имеют значение (0, 0, 255), поэтому для первых двух сравнений они получат значение under, поскольку
over.at<Vec3b>(y,x)[0] == color[0] а также
over.at<Vec3b>(y,x)[1] == color[1] ,
Только dst->at<Vec3b>(y,x)[2] получит значение 255. Чтобы линия выглядела сплошной, она должна быть dst->at<Vec3b>(y,x)[0] = 0 а также dst->at<Vec3b>(y,x)[1] = 0 вместо этого в этом случае.
Также, согласно этот ответ вам, вероятно, следует инициализировать * dst следующим образом:
*dst = Mat(under.rows,under.cols,CV_8UC3,CV_RGB(0,0,0));
так как это 3-х канальный мат.
Другие решения
Других решений пока нет …