OpenCV IDFT имеет странный шум и результат фильтра верхних частот кажется неправильным
Платформа: opencv 2.4.9 на win7 с VC2015
Выпуск:
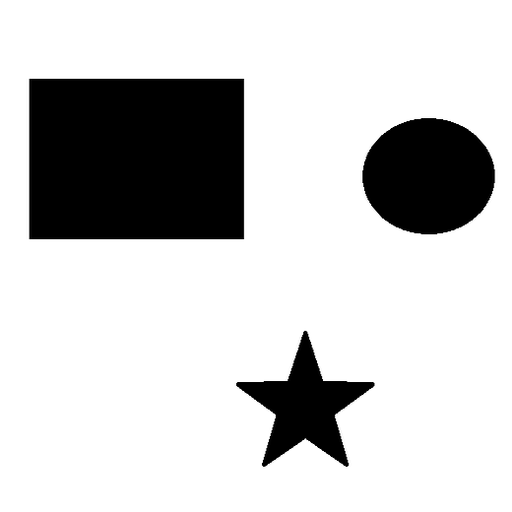 Входное изображение
Входное изображение 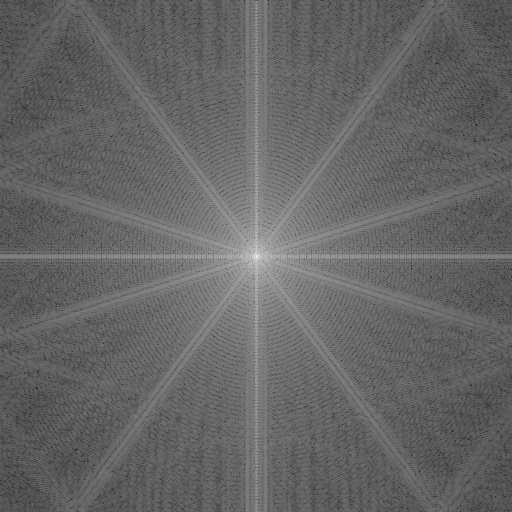 DFT величина изображения
DFT величина изображения
- странный шум:
Я использую dft для передачи изображения в частотную область и передачи обратно по idft.
Я использую 2 способа, чтобы получить результат. convertTo () и normalize ().
результат convertTo () имеет странный шум.
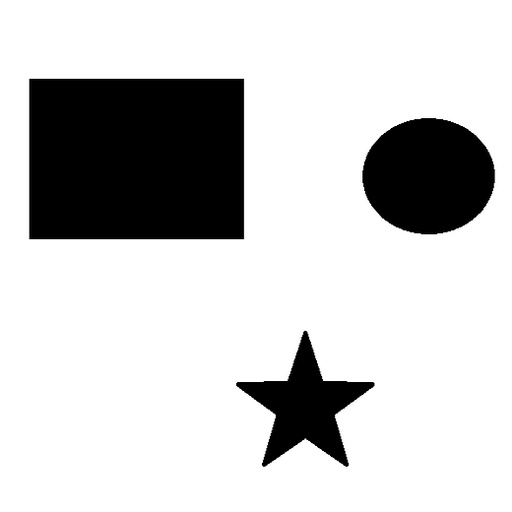
Результат normalize () ……….. ………. …………………. convertTo () результат
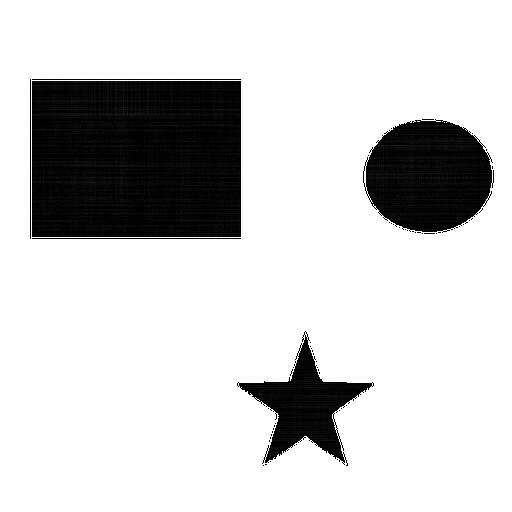
- неправильный результат фильтра верхних частот:
Я передаю изображение DFT (оба Re & Im) через гауссовский фильтр верхних частот
и результат. convertTo () и normalize () совершенно разные.
convertTo () кажется правильным, но имеет шум, а normalize () странный, но без шума …

изображение фильтра верхних частот для отображения
normalize () результат результата фильтра верхних частот ….. convertTo () результат результата фильтра верхних частот
Код:
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
using namespace cv;
using namespace std;
void DFT_Shift(Mat &a_tImage)
{
// rearrange the image so that the origin is at the image center
int cx = a_tImage.cols / 2;
int cy = a_tImage.rows / 2;
Mat q0(a_tImage, Rect(0, 0, cx, cy)); // Top-Left - Create a ROI per quadrant
Mat q1(a_tImage, Rect(cx, 0, cx, cy)); // Top-Right
Mat q2(a_tImage, Rect(0, cy, cx, cy)); // Bottom-Left
Mat q3(a_tImage, Rect(cx, cy, cx, cy)); // Bottom-Right
Mat tmp; // swap quadrants (Top-Left with Bottom-Right)
q0.copyTo(tmp);
q3.copyTo(q0);
tmp.copyTo(q3);
q1.copyTo(tmp); // swap quadrant (Top-Right with Bottom-Left)
q2.copyTo(q1);
tmp.copyTo(q2);
}
int main()
{
Mat I = imread("Src.bmp", CV_LOAD_IMAGE_GRAYSCALE);
if (I.empty())
return -1;
Mat padded; // expand input image to optimal size
int m = getOptimalDFTSize(I.rows);
int n = getOptimalDFTSize(I.cols); // on the border add zero values
copyMakeBorder(I, padded, 0, m - I.rows, 0, n - I.cols, BORDER_CONSTANT, Scalar::all(0));
Mat planes[] = { Mat_<float>(padded), Mat::zeros(padded.size(), CV_32F) };
#if DO_GHPF > 0
Mat tPlanesFilter[] = { Mat_<float>(padded), Mat::zeros(padded.size(), CV_32F) };
#endif
Mat complexI;
merge(planes, 2, complexI); // Add to the expanded another plane with zeros
dft(complexI, complexI); // this way the result may fit in the source matrix
// compute the magnitude and switch to logarithmic scale
// => log(1 + sqrt(Re(DFT(I))^2 + Im(DFT(I))^2))
split(complexI, planes); // planes[0] = Re(DFT(I), planes[1] = Im(DFT(I))
// Pass both Re & Im Planes through Gaussian High Pass Filter
#if DO_GHPF > 0
GaussianHighPassFilter(complexI, tPlanesFilter);
#endif
Mat magI = planes[0];
printf("Re: %f\n", planes[0].at<float>(40, 40));
printf("Im: %f\n", planes[1].at<float>(40, 40));
magnitude(magI, planes[1], planes[0]); // planes[0] = magnitude
// switch to logarithmic scale
magI += Scalar::all(1);
log(magI, magI);
// crop the spectrum, if it has an odd number of rows or columns
magI = magI(Rect(0, 0, magI.cols & -2, magI.rows & -2));
// dft data base should be shifted to image's center
DFT_Shift(magI);
// Transform the matrix with float values into a viewable image form (float between values 0 and 1).
normalize(magI, magI, 0, 1, CV_MINMAX);
imshow("Input Image", I); // Show the result
imshow("spectrum magnitude", magI);
magI = magI * 255;
imwrite("./Magnitude.jpg", magI);
#if 1 // test idft
Mat ifft;
idft(complexI, ifft, DFT_REAL_OUTPUT);
Mat ifftConvert;
ifft.convertTo(ifftConvert, CV_8U);
imwrite("./IDFT_CV_8U.jpg", ifft);
normalize(ifft, ifft, 0, 1, CV_MINMAX);
imshow("IDFT", ifft);
ifft = ifft * 255;
imwrite("./IDFT.jpg", ifft);
#endif
waitKey();
return 0;
}
Решение
Обратное преобразование Фурье не нормируется. Действительно, если изображение 512×512, idft(dft(x)) в 512×512 раз больше, чем x, Странный шум связан с тем, что числа больше не находятся в диапазоне 0 — 255.
В частности, обратный дфт имеет отрицательные значения и значения до 6,6e7. Это можно проверить, добавив:
double min, max;
cv::minMaxLoc(ifft, &min, &max);
std::cout << min<< " " << max <<std::endl;
Уменьшить обратный дфт можно, добавив:
ifft=ifft/(512*512);
Странный шум удаляется.
2 / Результат нормализации () фильтра верхних частот кажется правильным. Такой фильтр вычтет размытое изображение из исходного изображения. В частности, среднее значение выходного сигнала равно 0. Следовательно, оно имеет отрицательные и положительные значения. Поскольку в вашем случае максимум и минимум имеют одинаковую величину, normalize () установит нулевое значение около 127 \ приблизительный 255/2. Это причина, почему изображение становится серым. Значения белого соответствуют положительным значениям, а значения черного — отрицательным.
convertTo() получит очень большие отрицательные и положительные значения из диапазона 0 -255 для ребер. Эти значения будут преобразованы в белый. Вдали от краев значения близки к нулю, а цвет остается черным.
Другие решения
Других решений пока нет …