OpenCV Camera Stereo Calibration — Странные результаты
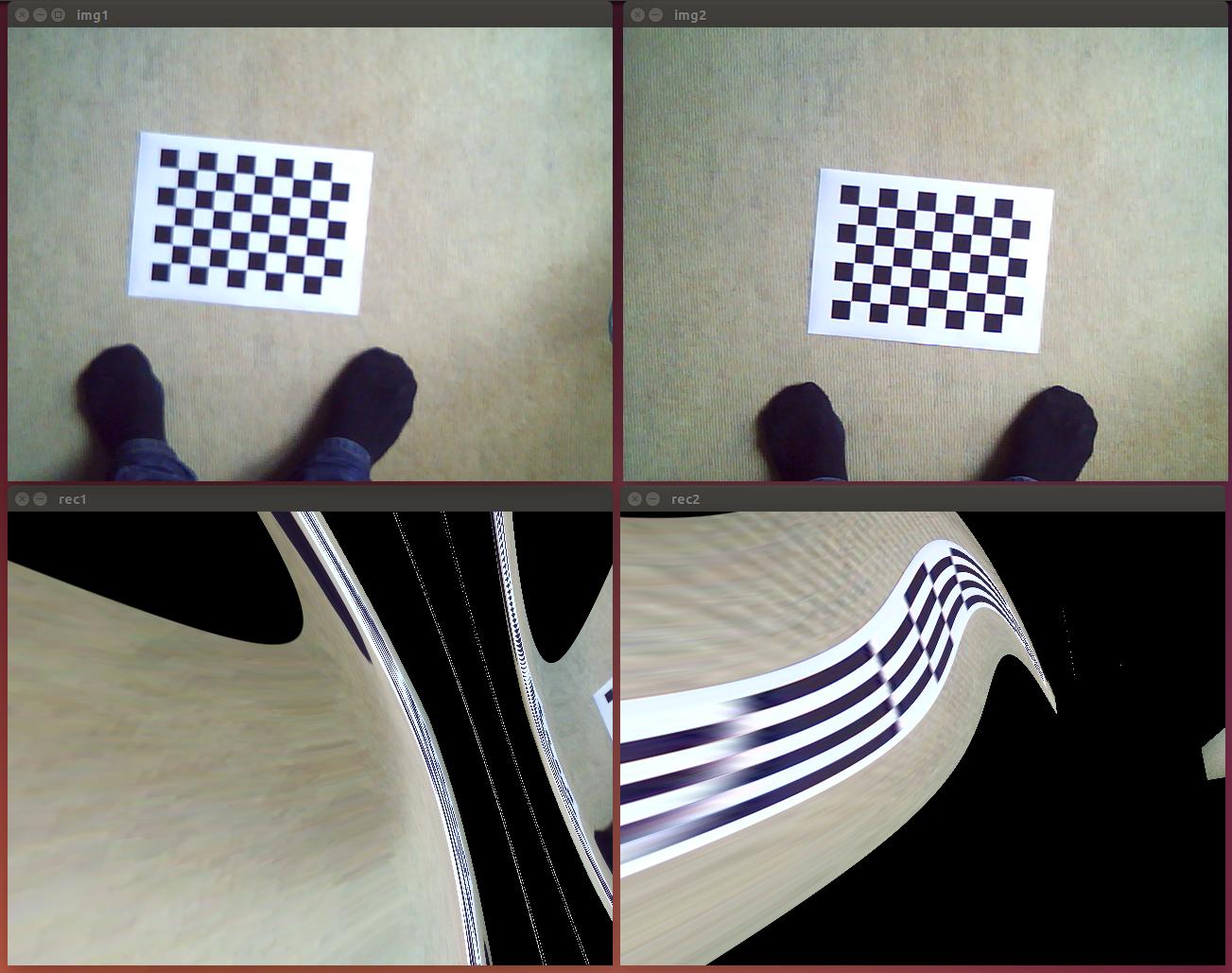
Я пытаюсь откалибровать мою стереокамеру Minoru с помощью OpenCV. Следующий код сначала калибрует камеру, а затем исправляет результаты. Когда я запускаю код, результаты исправления как-то странные.
Я прикрепил один из результатов.
Было бы очень полезно, если бы кто-то мог просмотреть мой код.
Спасибо Макс
Код:
#include <opencv2/core/core.hpp>
#include <opencv2/calib3d/calib3d.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/contrib/contrib.hpp>
#include "libcam.h"#include <stdio.h>
#include <iostream>
using namespace cv;
using namespace std;
void loadImagePair(Mat &img1, Mat &img2, int i) {
stringstream ss1, ss2;
ss1 << "data/saves/" << i << "_1.png";
ss2 << "data/saves/" << i << "_2.png";
/*if (i < 10) {
ss1 << "data/martinperris_images/left0" << i << ".ppm";
ss2 << "data/martinperris_images/right0" << i << ".ppm";
} else {
ss1 << "data/martinperris_images/left" << i << ".ppm";
ss2 << "data/martinperris_images/right" << i << ".ppm";
}*/
img1 = imread(ss1.str());
img2 = imread(ss2.str());
}
int main(int argc, char** argv) {
// The camera properties
int w = 640;
int h = 480;
int fps = 20;
// The chessboard properties
CvSize chessboardSize(9, 6);
float squareSize = 1.0f;
// This should contain the physical location of each corner, but since we don't know them, we are assigning constant positions
vector<vector<Point3f> > objPoints;
// The chessboard corner points in the images
vector<vector<Point2f> > imagePoints1, imagePoints2;
vector<Point2f> corners1, corners2;
// The constant positions of each obj points
vector<Point3f> obj;
for (int x = 0; x < chessboardSize.width; x++) {
for (int y = 0; y < chessboardSize.height; y++) {
obj.push_back(Point3f(x * squareSize, y * squareSize, 0));
}
}
/*for (int i = 0; i < chessboardSize.width * chessboardSize.height; i++) {
obj.push_back(Point3f(i / chessboardSize.width, i % chessboardSize.height, 0.0f));
}*/
// The images, which are proceeded
Mat img1, img2;
// The grayscale versions of the images
Mat gray1, gray2;
// Get the image count
int imageCount;
cout << "How much images to load: " << endl;
cin >> imageCount;
// The image number of the current image (nullbased)
int i = 0;
// Whether the chessboard corners in the images were found
bool found1 = false, found2 = false;
while (i < imageCount) {
// Load the images
cout << "Attempting to load image pair " << i << endl;
loadImagePair(img1, img2, i);
cout << "Loaded image pair" << endl;
// Convert to grayscale images
cvtColor(img1, gray1, CV_BGR2GRAY);
cvtColor(img2, gray2, CV_BGR2GRAY);
// Find chessboard corners
found1 = findChessboardCorners(img1, chessboardSize, corners1, CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_FILTER_QUADS);
found2 = findChessboardCorners(img2, chessboardSize, corners2, CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_FILTER_QUADS);
cout << "found 1/2: " << found1 << "/" << found2 << endl;
// Find corners to subpixel accuracy
if (found1) {
cornerSubPix(gray1, corners1, Size(11, 11), Size(-1, -1), TermCriteria(CV_TERMCRIT_EPS | CV_TERMCRIT_ITER, 30, 0.1));
drawChessboardCorners(gray1, chessboardSize, corners1, found1);
}
if (found2) {
cornerSubPix(gray2, corners2, Size(11, 11), Size(-1, -1), TermCriteria(CV_TERMCRIT_EPS | CV_TERMCRIT_ITER, 30, 0.1));
drawChessboardCorners(gray2, chessboardSize, corners2, found2);
}
// Store corners
if (found1 && found2) {
imagePoints1.push_back(corners1);
imagePoints2.push_back(corners2);
objPoints.push_back(obj);
cout << "Corners stored" << endl;
i++;
}
// Error
else {
cout << "Corners not found! Stopping" << endl;
return 0;
}
}
cout << "Starting calibration" << endl;
Mat CM1 = Mat(3, 3, CV_64F);
Mat CM2 = Mat(3, 3, CV_64F);
Mat D1 = Mat(1, 5, CV_64F);
Mat D2 = Mat(1, 5, CV_64F);
Mat R = Mat(3, 3, CV_64F);
Mat T = Mat(3, 1, CV_64F);
Mat E = Mat(3, 3, CV_64F);
Mat F = Mat(3, 3, CV_64F);
//stereoCalibrate(objPoints, imagePoints1, imagePoints2, CM1, D1, CM2, D2, img1.size(), R, T, E, F,
//CV_CALIB_SAME_FOCAL_LENGTH | CV_CALIB_ZERO_TANGENT_DIST, cvTermCriteria(CV_TERMCRIT_ITER + CV_TERMCRIT_EPS, 100, 1e-5));
stereoCalibrate(objPoints, imagePoints1, imagePoints2, CM1, D1, CM2, D2, img1.size(), R, T, E, F, 0,
cvTermCriteria(CV_TERMCRIT_ITER + CV_TERMCRIT_EPS, 100, 1e-5));
cout << "Done calibration" << endl;
cout << "Starting rectification" << endl;
Mat R1 = Mat(3, 3, CV_64F);
Mat R2 = Mat(3, 3, CV_64F);
Mat P1 = Mat(3, 4, CV_64F);
Mat P2 = Mat(3, 4, CV_64F);
Mat Q = Mat(4, 4, CV_64F);
stereoRectify(CM1, D1, CM2, D2, img1.size(), R, T, R1, R2, P1, P2, Q);
cout << "Done rectification" << endl;
cout << "Starting to store results" << endl;
FileStorage fs("stereocalib.yml", FileStorage::WRITE);
fs << "CM1" << CM1;
fs << "CM2" << CM2;
fs << "D1" << D1;
fs << "D2" << D2;
fs << "R" << R;
fs << "T" << T;
fs << "E" << E;
fs << "F" << F;
fs << "R1" << R1;
fs << "R2" << R2;
fs << "P1" << P1;
fs << "P2" << P2;
fs << "Q" << Q;
fs.release();
cout << "Done storing results" << endl;
cout << "Starting to apply undistort" << endl;
Mat map1x = Mat(img1.size().height, img1.size().width, CV_32F);
Mat map1y = Mat(img1.size().height, img1.size().width, CV_32F);
Mat map2x = Mat(img2.size().height, img2.size().width, CV_32F);
Mat map2y = Mat(img2.size().height, img2.size().width, CV_32F);
initUndistortRectifyMap(CM1, D1, R1, P1, img1.size(), CV_32FC1, map1x, map1y);
initUndistortRectifyMap(CM2, D2, R2, P2, img2.size(), CV_32FC1, map2x, map2y);
cout << "Done applying undistort" << endl;
// The rectified images
Mat imgU1 = Mat(img1.size(), img1.type()), imgU2 = Mat(img2.size(), img2.type());
// Show rectified images
i = 0;
while (i < imageCount) {
// Load the images
cout << "Attempting to load image pair " << i << endl;
loadImagePair(img1, img2, i);
cout << "Loaded image pair" << endl;
i++;
remap(img1, imgU1, map1x, map1y, INTER_LINEAR, BORDER_CONSTANT, Scalar());
remap(img2, imgU2, map2x, map2y, INTER_LINEAR, BORDER_CONSTANT, Scalar());
//remap(img1, imgU1, map1x, map1y, INTER_LINEAR, BORDER_DEFAULT);
//remap(img2, imgU2, map2x, map2y, INTER_LINEAR, BORDER_DEFAULT);
imshow("img1", img1);
imshow("img2", img2);
imshow("rec1", imgU1);
imshow("rec2", imgU2);
int key = waitKey(0);
if (key == 'q') {
break;
}
}
return 0;
}
Образ:
Решение
Наконец я узнал, в чем проблема. Изображения были хорошими, но я определила obj Vector неправильно. Должно быть:
// The constant positions of each obj points
vector<Point3f> obj;
for (int y = 0; y < chessboardSize.height; y++) {
for (int x = 0; x < chessboardSize.width; x++) {
obj.push_back(Point3f(y * squareSize, x * squareSize, 0));
}
}
Теперь у меня есть результат калибровки 1.57324, что, на мой взгляд, неплохо.
Другие решения