OpenCV C ++ создает повторно используемый набор ключевых точек и дескрипторов для сшивания нескольких изображений
Я создал программу, которая может сшивать несколько изображений вместе, и теперь я хочу повысить ее эффективность. В зависимости от размера сшиваемого изображения, в конечном итоге оно становится слишком большим и содержит слишком много ключевых точек, что машине не хватает выделяемой памяти. Чтобы компенсировать это, моя цель состоит в том, чтобы сохранить все ключевые точки и дескрипторы по мере их нахождения, чтобы мне не нужно было снова находить их в образе сшитого мастером, а нужно только найти их на новом сшиваемом изображении. У меня был этот процесс, работающий в Python, но не было такой же удачи в C ++.
Для этого мне нужно выполнить perspectiveTransform() на ключевых точках и для этого конвертировать их из vector<keypoint> в vector<point2f> и обратно к vector<keypoint>, Я смог добиться этого и могу подтвердить, что это работает (выберите, чтобы следовать). Я не уверен, что тот же процесс должен быть сделан для дескрипторов (в настоящее время у меня есть это, но либо неправильно, либо неэффективно).
Проблема: когда я запускаю это, ключевые точки и дескрипторы, кажется, не работают, и я выдаю ошибку, которую я создал: «Недостаточно совпадений», хотя я знаю, что по крайней мере ключевые точки пробиваются к функции.
Вот код для преобразования ключевой точки и дескриптора. Код сначала вычисляет WarpPerspective, который будет применен к изображению один, так как гомография деформирует только второе изображение. Остальная часть кода имеет дело с ключевыми точками и дескрипторами.
tuple<Mat, vector<KeyPoint>, Mat> stitchMatches(Mat image1,Mat image2, Mat homography, vector<KeyPoint> kp1, vector<KeyPoint> kp2 , Mat desc1, Mat desc2){
Mat result, destination, descriptors_updated;
vector<Point2f> fourPoint;
vector<KeyPoint> keypoints_updated;
//-Get the four corners of the first image (master)
fourPoint.push_back(Point2f (0,0));
fourPoint.push_back(Point2f (image1.size().width,0));
fourPoint.push_back(Point2f (0, image1.size().height));
fourPoint.push_back(Point2f (image1.size().width, image1.size().height));
//perspectiveTransform(Mat(fourPoint), destination, homography);//- Get points used to determine Htr
double min_x, min_y, tam_x, tam_y;
float min_x1, min_x2, min_y1, min_y2, max_x1, max_x2, max_y1, max_y2;
min_x1 = min(fourPoint.at(0).x, fourPoint.at(1).x);
min_x2 = min(fourPoint.at(2).x, fourPoint.at(3).x);
min_y1 = min(fourPoint.at(0).y, fourPoint.at(1).y);
min_y2 = min(fourPoint.at(2).y, fourPoint.at(3).y);
max_x1 = max(fourPoint.at(0).x, fourPoint.at(1).x);
max_x2 = max(fourPoint.at(2).x, fourPoint.at(3).x);
max_y1 = max(fourPoint.at(0).y, fourPoint.at(1).y);
max_y2 = max(fourPoint.at(2).y, fourPoint.at(3).y);
min_x = min(min_x1, min_x2);
min_y = min(min_y1, min_y2);
tam_x = max(max_x1, max_x2);
tam_y = max(max_y1, max_y2);
//- Htr use to map image one to result in line with the alredy warped image 1
Mat Htr = Mat::eye(3,3,CV_64F);
if (min_x < 0){
tam_x = image2.size().width - min_x;
Htr.at<double>(0,2)= -min_x;
}
if (min_y < 0){
tam_y = image2.size().height - min_y;
Htr.at<double>(1,2)= -min_y;
}
result = Mat(Size(tam_x*2,tam_y*2), CV_8UC3,cv::Scalar(0,0,0));
warpPerspective(image2, result, Htr, result.size(), INTER_LINEAR, BORDER_TRANSPARENT, 0);
warpPerspective(image1, result, (Htr*homography), result.size(), INTER_LINEAR, BORDER_TRANSPARENT,0);//-- Variables to hold the keypoints at the respective stages
vector<Point2f> kp1Local,kp2Local;
vector<KeyPoint> kp1updated, kp2updated;//Localize the keypoints to allow for perspective change
KeyPoint::convert(kp1, kp1Local);
KeyPoint::convert(kp2, kp2Local);
//perform persepctive transform on the keypoints of type vector<point2f>
perspectiveTransform(kp1Local, kp1Local, (Htr));
perspectiveTransform(kp2Local, kp2Local, (Htr*homography));//convert keypoints back to type vector<keypoint>
for( size_t i = 0; i < kp1Local.size(); i++ ) {
kp1updated.push_back(KeyPoint(kp1Local[i], 1.f));
}
for( size_t i = 0; i < kp2Local.size(); i++ ) {
kp2updated.push_back(KeyPoint(kp2Local[i], 1.f));
}
//Add to master of list of keypoints to be passed along during next iteration of image
keypoints_updated.reserve(kp1updated.size() + kp2updated.size());
keypoints_updated.insert(keypoints_updated.end(),kp1updated.begin(),kp1updated.end());
keypoints_updated.insert(keypoints_updated.end(),kp2updated.begin(),kp2updated.end());
//WarpPerspective of decriptors to match that of the images and cooresponding keypoints
Mat desc1New, desc2New;
warpPerspective(desc2, desc2New, Htr, result.size(), INTER_LINEAR, BORDER_TRANSPARENT, 0);
warpPerspective(desc1, desc1New, (Htr*homography), result.size(), INTER_LINEAR, BORDER_TRANSPARENT,0);
//create a new Mat including the descriports from desc1 and desc2
descriptors_updated.push_back(desc1New);
descriptors_updated.push_back(desc2New);//------------TEST TO see if keypoints have moved
Mat img_keypoints;
drawKeypoints( result, keypoints_updated, img_keypoints, Scalar::all(-1), DrawMatchesFlags::DEFAULT );
imshow("Keypoints 1", img_keypoints );
waitKey();
destroyAllWindows();return {result, keypoints_updated, descriptors_updated};
}
Следующий код — моя мастер-программа для сшивания, которая выполняет фактическое сшивание.
tuple<Mat,vector<KeyPoint>,Mat> stitch(Mat img1,Mat img2 ,vector<KeyPoint> keypoints, Mat descriptors, String featureDetection,String featureExtractor,String keypointsMatcher,String showMatches){
Mat desc, desc1, desc2, homography, result, croppedResult,descriptors_updated;
std::vector<KeyPoint> keypoints_updated, kp1, kp2;
std::vector<DMatch> matches;
//-Base Case[2]
if (keypoints.empty()){
//-Detect Keypoints and their descriptors
tie(kp1,desc1) = KeyPointDescriptor(img1, featureDetection,featureExtractor);
tie(kp2,desc2) = KeyPointDescriptor(img2, featureDetection,featureExtractor);
//Find matches and calculated homography based on keypoints and descriptors
std::tie(matches,homography) = matchFeatures(kp1, desc1,kp2, desc2, keypointsMatcher);
//draw matches if requested
if(showMatches == "true"){
drawMatchedImages( img1, kp1, img2, kp2, matches);
}
//stitch the images and update the keypoint and descriptors
std::tie(result,keypoints_updated,descriptors_updated) = stitchMatches(img1, img2, homography,kp1,kp2,desc1,desc2);
//crop function using created cropping function
croppedResult = crop(result);
return {croppedResult,keypoints_updated,descriptors_updated};
}
//base case[3:n]
else{
//Get keypoints and descriptors of new image and add to respective lists
tie(kp2,desc2) = KeyPointDescriptor(img2, featureDetection,featureExtractor);
//find matches and determine homography
std::tie(matches,homography) = matchFeatures(keypoints_updated,descriptors_updated,kp2,desc2, keypointsMatcher);
//draw matches if requested
if(showMatches == "true")
drawMatchedImages( img1, keypoints, img2, kp2, matches);
//stitch the images and update the keypoint and descriptors
tie(result,keypoints_updated,descriptors_updated) = stitchMatches(img1, img2, homography,keypoints,kp2,descriptors,desc2);
//crop function using created cropping function
croppedResult = crop(result);
return {croppedResult,keypoints_updated,descriptors_updated};
}
}
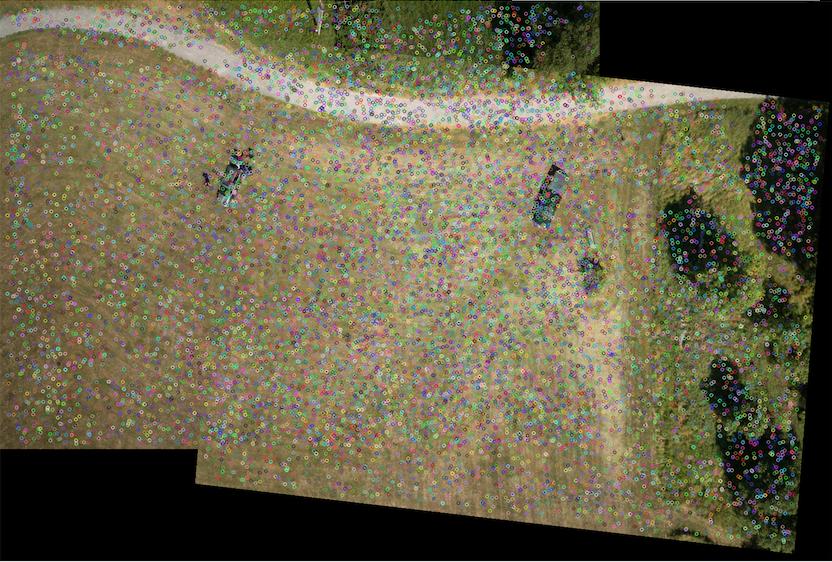
Наконец, вот изображение ключевых точек, которые преобразуются в сшитое изображение. Любая помощь очень ценится!
Решение
После того, как я пролистал список, я обнаружил, что однажды использовал неправильную переменную! 🙂
Другие решения
Других решений пока нет …