Обнаружение открытого CV объекта: детектор ORB_GPU и экстрактор дескриптора SURF_GPU
Я просто проводил небольшой эксперимент, чтобы поиграть с различными комбинациями детектор / дескриптор.
Мой код использует детектор ORB_GPU для обнаружения функций и дескриптор SURF_GPU для расчета дескрипторов. Я использую BruteForceMatcher_GPU для сопоставления дескрипторов и подаю в суд на метод knnMatch для получения совпадений. Проблема в том, что я получаю много нежелательных совпадений, код буквально соответствует каждой функции, которую можно найти на обоих изображениях. Я довольно смущен с этим поведением. Ниже приведен мой код (версия для графического процессора)
#include "stdafx.h"#include <stdio.h>
#include <iostream>
#include "opencv2/core/core.hpp"#include "opencv2/nonfree/features2d.hpp"#include "opencv2/highgui/highgui.hpp"#include "opencv2/imgproc/imgproc.hpp"#include "opencv2/calib3d/calib3d.hpp"#include "opencv2/gpu/gpu.hpp"#include "opencv2/nonfree/gpu.hpp"
using namespace cv;
using namespace cv::gpu;
int main()
{
Mat object = imread( "140614-194209.jpg", CV_LOAD_IMAGE_GRAYSCALE );
if( !object.data )
{
std::cout<< "Error reading object " << std::endl;
return -1;
}
GpuMat object_gpu;
GpuMat object_gpukp;
GpuMat object_gpudsc;
vector<float> desc_object_cpu;
std::vector<KeyPoint> kp_object;
int minHessian = 400;
object_gpu.upload(object);
if( !object_gpu.data)
{
std::cout<< "Error reading object " << std::endl;
return -1;
}
GpuMat mask(object_gpu.size(), CV_8U, 0xFF);
mask.setTo(0xFF);
ORB_GPU detector = ORB_GPU(minHessian);
detector.blurForDescriptor = true;
SURF_GPU extractor;
detector(object_gpu,GpuMat(),object_gpukp);
extractor(object_gpu,GpuMat(),object_gpukp,object_gpudsc,true);
BruteForceMatcher_GPU<L2 <float>> matcher;
detector.downloadKeyPoints(object_gpukp,kp_object);
extractor.downloadDescriptors(object_gpudsc,desc_object_cpu);
Mat descriptors_test_CPU_Mat(desc_object_cpu);
VideoCapture cap(0);
namedWindow("Good Matches");
std::vector<Point2f> obj_corners(4);
//Get the corners from the object
obj_corners[0] = cvPoint(0,0);
obj_corners[1] = cvPoint( object.cols, 0 );
obj_corners[2] = cvPoint( object.cols, object.rows );
obj_corners[3] = cvPoint( 0, object.rows );
unsigned long AAtime=0, BBtime=0;
unsigned long Time[110];
char key = 'a';
int framecount = 0;
int count = 0;
while (key != 27)
{
Mat frame;
Mat img_matches;
std::vector<KeyPoint> kp_image;
std::vector<vector<DMatch > > matches;
std::vector<DMatch > good_matches;
std::vector<Point2f> obj;
std::vector<Point2f> scene;
std::vector<Point2f> scene_corners(4);
vector<float> desc_image_cpu;
Mat H;
Mat image;
GpuMat image_gpu;
GpuMat image_gpukp;
GpuMat image_gpudsc;
cap >> frame;
if (framecount < 5)
{
framecount++;
continue;
}
if(count == 0)
{
AAtime = getTickCount();
}
cvtColor(frame, image, CV_RGB2GRAY);image_gpu.upload(image);
detector(image_gpu,GpuMat(),image_gpukp);
extractor(image_gpu,GpuMat(),image_gpukp,image_gpudsc,true);
matcher.knnMatch(object_gpudsc,image_gpudsc,matches,2);
detector.downloadKeyPoints(image_gpukp,kp_image);
extractor.downloadDescriptors(image_gpudsc,desc_image_cpu);
Mat des_image(desc_image_cpu);
for(int i = 0; i < min(des_image.rows-1,(int) matches.size()); i++) //THIS LOOP IS SENSITIVE TO SEGFAULTS
{
if((matches[i][0].distance < 0.6*(matches[i][1].distance)) && ((int) matches[i].size()<=2 && (int) matches[i].size()>0))
{
good_matches.push_back(matches[i][0]);
}
}
//Draw only "good" matches
drawMatches( object, kp_object, image, kp_image, good_matches, img_matches, Scalar::all(-1), Scalar::all(-1), vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS );
if (good_matches.size() >= 14)
{
for( int i = 0; i < good_matches.size(); i++ )
{
//Get the keypoints from the good matches
obj.push_back( kp_object[ good_matches[i].queryIdx ].pt );
scene.push_back( kp_image[ good_matches[i].trainIdx ].pt );
}
H = findHomography( obj, scene, CV_RANSAC );
perspectiveTransform( obj_corners, scene_corners, H);
//Draw lines between the corners (the mapped object in the scene image )
line( img_matches, scene_corners[0] + Point2f( object.cols, 0), scene_corners[1] + Point2f( object.cols, 0), Scalar(0, 255, 0), 4 );
line( img_matches, scene_corners[1] + Point2f( object.cols, 0), scene_corners[2] + Point2f( object.cols, 0), Scalar( 0, 255, 0), 4 );
line( img_matches, scene_corners[2] + Point2f( object.cols, 0), scene_corners[3] + Point2f( object.cols, 0), Scalar( 0, 255, 0), 4 );
line( img_matches, scene_corners[3] + Point2f( object.cols, 0), scene_corners[0] + Point2f( object.cols, 0), Scalar( 0, 255, 0), 4 );
}
//Show detected matches
imshow( "Good Matches", img_matches );
matcher.clear();
detector.release();
BBtime = getTickCount();
count++;
if(count == 10000)
{
BBtime = getTickCount();
printf("Processing time = %.2lf(sec) \n", (BBtime - AAtime)/getTickFrequency() );
break;
}
extractor.releaseMemory();
detector.release();
key = waitKey(1);
}
return 0;
}
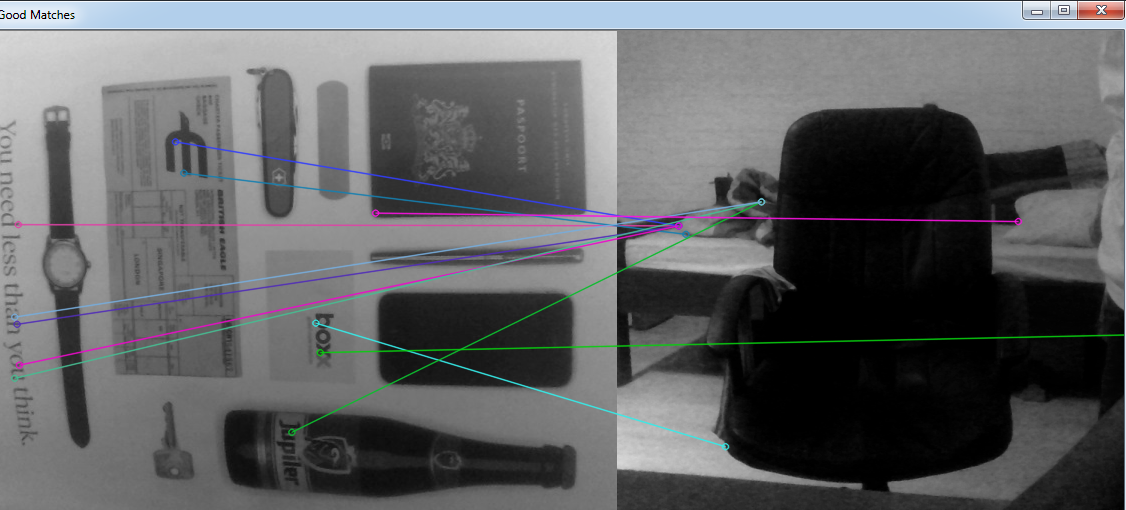
Как видно на рисунке, код дает случайные совпадения чему угодно. Я попробовал то же самое, используя обычные функции процессора, и это прилично точно. Код для версии процессора ниже
#include "stdafx.h"#include <stdio.h>
#include <iostream>
#include "opencv2/core/core.hpp"#include "opencv2/nonfree/features2d.hpp"#include "opencv2/highgui/highgui.hpp"#include "opencv2/imgproc/imgproc.hpp"#include "opencv2/calib3d/calib3d.hpp"
using namespace cv;
int main()
{
Mat object = imread( "140614-194209.jpg", CV_LOAD_IMAGE_GRAYSCALE );
if( !object.data )
{
std::cout<< "Error reading object " << std::endl;
return -1;
}
//Detect the keypoints using SURF Detector
int minHessian = 500;
OrbFeatureDetector detector( minHessian );
std::vector<KeyPoint> kp_object;
detector.detect( object, kp_object );
//Calculate descriptors (feature vectors)
SurfDescriptorExtractor extractor;
Mat des_object;
extractor.compute( object, kp_object, des_object );
FlannBasedMatcher matcher;
VideoCapture cap(0);
namedWindow("Good Matches");
std::vector<Point2f> obj_corners(4);
//Get the corners from the object
obj_corners[0] = cvPoint(0,0);
obj_corners[1] = cvPoint( object.cols, 0 );
obj_corners[2] = cvPoint( object.cols, object.rows );
obj_corners[3] = cvPoint( 0, object.rows );
char key = 'a';
int framecount = 0;
while (key != 27)
{
Mat frame;
cap >> frame;
if (framecount < 5)
{
framecount++;
continue;
}
Mat des_image, img_matches;
std::vector<KeyPoint> kp_image;
std::vector<vector<DMatch > > matches;
std::vector<DMatch > good_matches;
std::vector<Point2f> obj;
std::vector<Point2f> scene;
std::vector<Point2f> scene_corners(4);
Mat H;
Mat image;
cvtColor(frame, image, CV_RGB2GRAY);
detector.detect( image, kp_image );
extractor.compute( image, kp_image, des_image );
matcher.knnMatch(des_object, des_image, matches, 2);
for(int i = 0; i < min(des_image.rows-1,(int) matches.size()); i++) //THIS LOOP IS SENSITIVE TO SEGFAULTS
{
if((matches[i][0].distance < 0.6*(matches[i][1].distance)) && ((int) matches[i].size()<=2 && (int) matches[i].size()>0))
{
good_matches.push_back(matches[i][0]);
}
}
//Draw only "good" matches
drawMatches( object, kp_object, image, kp_image, good_matches, img_matches, Scalar::all(-1), Scalar::all(-1), vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS );
if (good_matches.size() >= 4)
{
for( int i = 0; i < good_matches.size(); i++ )
{
//Get the keypoints from the good matches
obj.push_back( kp_object[ good_matches[i].queryIdx ].pt );
scene.push_back( kp_image[ good_matches[i].trainIdx ].pt );
}
H = findHomography( obj, scene, CV_RANSAC );
perspectiveTransform( obj_corners, scene_corners, H);
//Draw lines between the corners (the mapped object in the scene image )
line( img_matches, scene_corners[0] + Point2f( object.cols, 0), scene_corners[1] + Point2f( object.cols, 0), Scalar(0, 255, 0), 4 );
line( img_matches, scene_corners[1] + Point2f( object.cols, 0), scene_corners[2] + Point2f( object.cols, 0), Scalar( 0, 255, 0), 4 );
line( img_matches, scene_corners[2] + Point2f( object.cols, 0), scene_corners[3] + Point2f( object.cols, 0), Scalar( 0, 255, 0), 4 );
line( img_matches, scene_corners[3] + Point2f( object.cols, 0), scene_corners[0] + Point2f( object.cols, 0), Scalar( 0, 255, 0), 4 );
}
//Show detected matches
imshow( "Good Matches", img_matches );
key = waitKey(1);
}
return 0;
}
Любая помощь будет принята с благодарностью.
Решение
Задача ещё не решена.
Другие решения