не получается ожидаемый результат для карты несоответствия двух изображений
Недавно я начал работать над opencv и столкнулся с проблемой получения желаемого результата. Я не знаю, где я ошибаюсь. У меня есть два некалиброванных изображения, и я должен рассчитать для них карту диспаратности без каких-либо других данных поддержки (например, матрицы камеры).
int minHessian = 2080;
Ptr<SURF> detector = SURF::create(minHessian);
std::vector<KeyPoint> keypoints_1, keypoints_2;
Mat descriptors_1, descriptors_2;
detector->detectAndCompute(h1, noArray(), keypoints_1, descriptors_1);
detector->detectAndCompute(h2, noArray(), keypoints_2, descriptors_2);
//-- Step 2: Matching descriptor vectors using FLANN matcher
FlannBasedMatcher matcher;
std::vector<DMatch> matches;
matcher.match(descriptors_1, descriptors_2, matches);
double max_dist = 0;
double min_dist = 100;
//-- Quick calculation of max and min distances between keypoints
for (int i = 0; i < descriptors_1.rows; i++) {
double dist = matches[i].distance;
if (dist < min_dist)
min_dist = dist;
if (dist > max_dist)
max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist);
printf("-- Min dist : %f \n", min_dist);
Mat img_matches;
drawMatches(h1, keypoints_1, h2, keypoints_2, good_matches, img_matches,Scalar::all(-1), Scalar::all(-1), vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
//-- Show detected matches
imshow("Good Matches", img_matches);
imwrite("Good Matches.jpg", img_matches);
for (int i = 0; i < (int) good_matches.size(); i++) {
printf("-- Good Match [%d] Keypoint 1: %d -- Keypoint 2: %d \n", i,good_matches[i].queryIdx, good_matches[i].trainIdx);
}
std::vector<cv::Point2f> obj;
std::vector<cv::Point2f> scene;
for (int i = 0; i < good_matches.size(); i++) {
//-- Get the keypoints from the good matches
obj.push_back(keypoints_1[good_matches[i].queryIdx].pt);
scene.push_back(keypoints_2[good_matches[i].trainIdx].pt);
}
cv::Mat H = cv::findFundamentalMat(obj, scene, CV_FM_RANSAC);
cv::Mat H1(4, 4, h1.type());
cv::Mat H2(4, 4, h1.type());
cv::stereoRectifyUncalibrated(obj, scene, H, h1.size(), H1, H2);
imshow("h1", h1);
cv::Mat rectified1(h1.size(), h1.type());
cv::warpPerspective(h1, rectified1, H1, h1.size());
cv::imshow("rectified1.jpg", rectified1);
cv::imwrite("rectified1.jpg", rectified1);
imshow("h2", h2);
cv::Mat rectified2(h2.size(), h2.type());
cv::warpPerspective(h2, rectified2, H2, h2.size());
cv::imshow("rectified2.jpg", rectified2);
cv::imwrite("rectified2.jpg", rectified2);
Mat test;
addWeighted(rectified1, 0.5, rectified2, 0.5, 0.0, test);
imshow("test", test);
//-- Depth map
int ndisparities = 16*5;
double minVal;
double maxVal;
Ptr<StereoSGBM> sgbm = StereoSGBM::create(16, ndisparities, 1, 0, 0, 0,0, 0,0, 0,StereoSGBM::MODE_HH);
//-- 3. Calculate the disparity image via SGBM
Mat disparity2;
sgbm->compute(rectified1, rectified2, disparity2);
minMaxLoc(disparity2, &minVal, &maxVal);
printf("Min disp: %f Max value: %f \n", minVal, maxVal);
disparity2.convertTo(disparity2, CV_8UC1, 255 / (maxVal - minVal));
cv::imshow("Disparity Map sgbm", disparity2);
imwrite("out2.jpg", disparity2);
Левое изображение и правое изображение
выпрямленное левое и правое изображение
Я думаю, что выпрямленные изображения в порядке, и проблема в параметре sgbm. Есть ли способ их откалибровать.
Решение
Да, ваши исправленные изображения выглядят хорошо, и да, трудно найти хорошие параметры. Я старался
Ptr<StereoSGBM> sgbm = StereoSGBM::create(0, //int minDisparity
80, //int numDisparities
5, //int SADWindowSize 3
600, //int P1 = 0
2400, //int P2 = 0
0, //int disp12MaxDiff = 0
0, //int preFilterCap = 0
0, //int uniquenessRatio = 0
0, //int speckleWindowSize = 0
0, //int speckleRange = 0
false); //bool fullDP = false
и результат довольно лучше: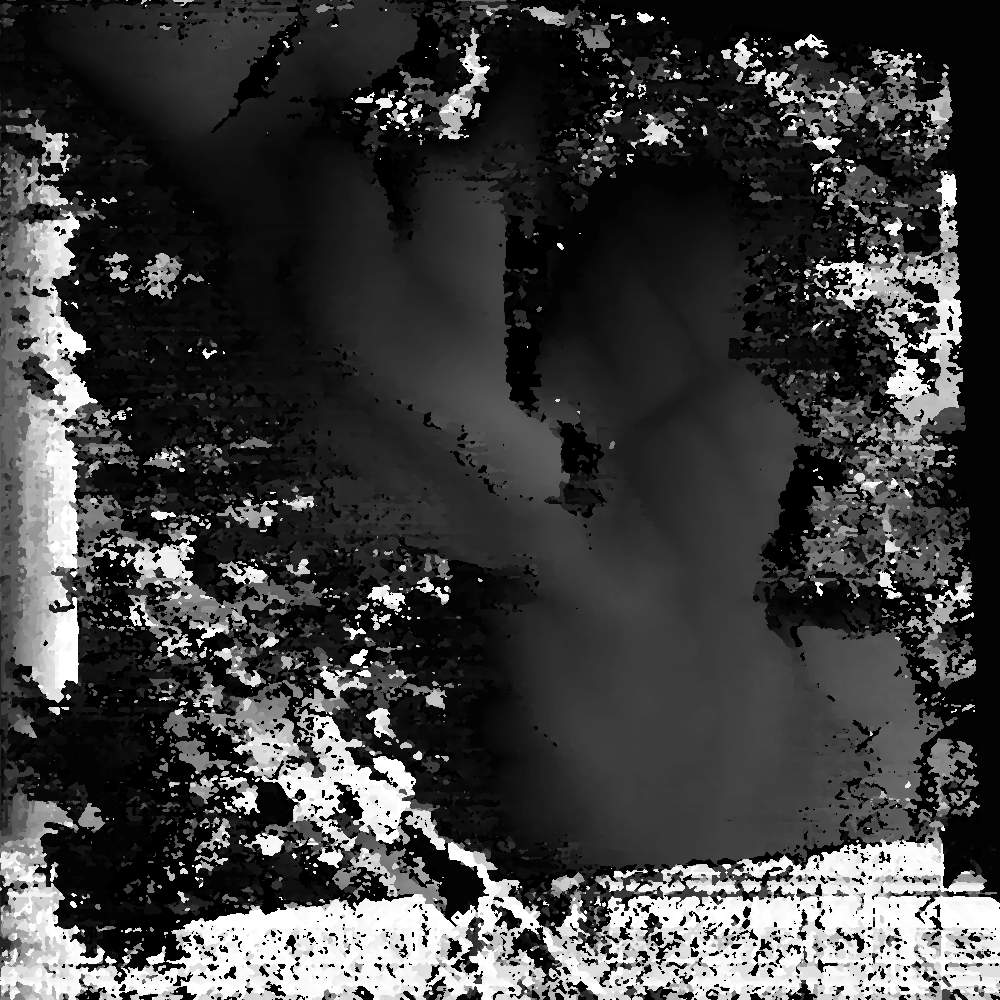
Другие решения
Других решений пока нет …