Как узнать координаты (0,0) после того, как применить warpperspective (opencv)?
Я должен применить warpperspective с использованием opencv для монтирования мозаики с изображениями varios, но я столкнулся с очень большой проблемой …
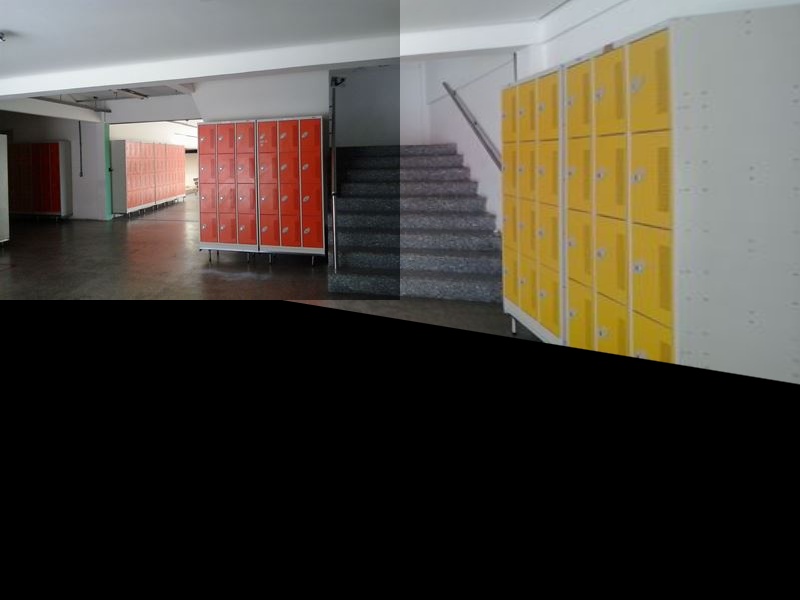
Когда я применил cvWarpPerspective, сгенерированное изображение не отображается в окне.
Появляется только часть изображения, и мне нужно знать, как найти координаты (0,0) моего изображения после применения основы.
Можно увидеть, что на первом изображении часть изображения обрезана, если сравнивать со вторым изображением, представленным здесь.
Поэтому моя проблема заключается в следующем: как определить координаты старта после применения основы?
Мне нужна помощь, чтобы решить эту проблему.
Как я могу решить эту проблему, используя инструмент OpenCV?
Как я могу решить эту проблему, используя OpenCV?
Это мой код:
#include <stdio.h>
#include <iostream>
#include "opencv2/core/core.hpp"#include "opencv2/features2d/features2d.hpp"#include "opencv2/highgui/highgui.hpp"#include "opencv2/nonfree/nonfree.hpp"#include "opencv2/calib3d/calib3d.hpp"#include "opencv2/imgproc/imgproc.hpp"
using namespace cv;
void readme();
/** @function main */
int main( int argc, char** argv )
{// Load the images
Mat image1= imread( "f.jpg");
Mat image2= imread( "e.jpg" );
Mat gray_image1;
Mat gray_image2;
// Convert to Grayscale
cvtColor( image1, gray_image1, CV_RGB2GRAY );
cvtColor( image2, gray_image2, CV_RGB2GRAY );
imshow("first image",image2);
imshow("second image",image1);//-- Step 1: Detect the keypoints using SURF Detector
int minHessian = 100;
SurfFeatureDetector detector( minHessian );
std::vector< KeyPoint > keypoints_object, keypoints_scene;
detector.detect( gray_image1, keypoints_object );
detector.detect( gray_image2, keypoints_scene );
//-- Step 2: Calculate descriptors (feature vectors)
SurfDescriptorExtractor extractor;
Mat descriptors_object, descriptors_scene;
extractor.compute( gray_image1, keypoints_object, descriptors_object );
extractor.compute( gray_image2, keypoints_scene, descriptors_scene );
//-- Step 3: Matching descriptor vectors using FLANN matcher
FlannBasedMatcher matcher;
std::vector< DMatch > matches;
matcher.match( descriptors_object, descriptors_scene, matches );
double max_dist = 0; double min_dist = 100;
//-- Quick calculation of max and min distances between keypoints
for( int i = 0; i < descriptors_object.rows; i++ )
{ double dist = matches[i].distance;
if( dist < min_dist ) min_dist = dist;
if( dist > max_dist ) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist );
printf("-- Min dist : %f \n", min_dist );
//-- Use only "good" matches (i.e. whose distance is less than 3*min_dist )
std::vector< DMatch > good_matches;
for( int i = 0; i < descriptors_object.rows; i++ )
{ if( matches[i].distance < 3*min_dist )
{ good_matches.push_back( matches[i]); }
}
std::vector< Point2f > obj;
std::vector< Point2f > scene;
for( int i = 0; i < good_matches.size(); i++ )
{
//-- Get the keypoints from the good matches
obj.push_back( keypoints_object[ good_matches[i].queryIdx ].pt );
scene.push_back( keypoints_scene[ good_matches[i].trainIdx ].pt );
}
// Find the Homography Matrix
Mat H = findHomography( obj, scene, CV_RANSAC);
// Use the Homography Matrix to warp the images
cv::Mat result;
warpPerspective(image1,result,H,cv::Size());
imshow("WARP", result);
cv::Mat half(result,cv::Rect(0,0,image2.cols,image2.rows));
image2.copyTo(half);
Mat key;
//drawKeypoints(image1,keypoints_scene,key,Scalar::all(-1), DrawMatchesFlags::DEFAULT );
//drawMatches(image2, keypoints_scene, image1, keypoints_object, matches, result);
imshow( "Result", result );
imwrite("teste.jpg", result);
waitKey(0);
return 0;
}
/** @function readme */
void readme()
{ std::cout << " Usage: Panorama < img1 > < img2 >" << std::endl; }
На этом изображении появляется второе изображение разреза. Увидеть
Я хочу, чтобы мое изображение появилось в этой форме:

Решение
Приведенная ниже модификация должна решить вашу проблему удаления черной части сшитого изображения.
Попробуйте изменить эту строку:
warpPerspective(image1,result,H,cv::Size());
в
warpPerspective(image1,result,H,cv::Size(image1.cols+image2.cols,image1.rows));
Это создает result матрица с количеством строк, равным числу image1, тем самым избегая нежелательных строк, которые будут созданы.
Другие решения