Как установить входные и выходные значения Eigen DesnseFunctor для использования в Eigen Levenberg Marquardt
проблемаЯ не всегда знаю точный размер вектора Якобиана или Функции, на котором я собираюсь использовать Левенберга Марквардта. Поэтому мне нужно установить их размеры во время компиляции.
ожидаемый: После того, как я объявил экземпляр MyFunctorDense. Я мог бы установить «InputsAtCompileTime» в мой размер ввода и установить «ValuesAtCompileTime» в мой размер значений. Тогда мой якобиан, aFjac, должен иметь размеры tValues x tInputs, а вектор моей функции, aH, должен иметь размеры tValues x 1.
Наблюдаемый:
.ч файл
#pragma once
#include "stdafx.h"#include <iostream>
#include <unsupported/Eigen/LevenbergMarquardt>
#include <unsupported/Eigen/NumericalDiff>//Generic functor
template <typename _Scalar, typename _Index>
struct MySparseFunctor
{
typedef _Scalar Scalar;
typedef _Index Index;
typedef Eigen::Matrix<Scalar,Eigen::Dynamic,1> InputType;
typedef Eigen::Matrix<Scalar,Eigen::Dynamic,1> ValueType;
typedef Eigen::SparseMatrix<Scalar, Eigen::ColMajor, Index>
JacobianType;
typedef Eigen::SparseQR<JacobianType, Eigen::COLAMDOrdering<int> >
QRSolver;
enum {
InputsAtCompileTime = Eigen::Dynamic,
ValuesAtCompileTime = Eigen::Dynamic
};
MySparseFunctor(int inputs, int values) : m_inputs(inputs),
m_values(values) {}
int inputs() const { return m_inputs; }
int values() const { return m_values; }
const int m_inputs, m_values;};
template <typename _Scalar, int NX=Eigen::Dynamic, int NY=Eigen::Dynamic>
struct MyDenseFunctor
{
typedef _Scalar Scalar;
enum {
InputsAtCompileTime = NX,
ValuesAtCompileTime = NY
};
typedef Eigen::Matrix<Scalar,InputsAtCompileTime,1> InputType;
typedef Eigen::Matrix<Scalar,ValuesAtCompileTime,1> ValueType;
typedef Eigen::Matrix<Scalar,ValuesAtCompileTime,InputsAtCompileTime>
JacobianType;
typedef Eigen::ColPivHouseholderQR<JacobianType> QRSolver;
const int m_inputs, m_values;
MyDenseFunctor() : m_inputs(InputsAtCompileTime),
m_values(ValuesAtCompileTime) {}
MyDenseFunctor(int inputs, int values) : m_inputs(inputs),
m_values(values) {}
int inputs() const { return m_inputs; }
int values() const { return m_values; }
};struct MyFunctorSparse : MySparseFunctor<double, int>
{
MyFunctorSparse(void) : MySparseFunctor<double, int>(2 , 2) {}
int operator()(const Eigen::VectorXd &aX, //Input
Eigen::VectorXd &aF) const; //Output
int df(const InputType &aF, JacobianType& aFjac);
};struct MyFunctorDense : MyDenseFunctor<double>
{
MyFunctorDense(void) : MyDenseFunctor<double>( Eigen::Dynamic ,
Eigen::Dynamic) {}
int operator()(const InputType &aX, //Input
ValueType &aF) const; //Output
int df(const InputType &aX, JacobianType& aFjac);
};
.файл cpp
#pragma один раз
#include «stdafx.h» #include «Main.h»
int MyFunctorSparse::operator()(const Eigen::VectorXd &aX, //Input
Eigen::VectorXd &aF) const //Output
{
//F = aX0^2 + aX1^2
aF(0) = aX(0)*aX(0) + aX(1)*aX(1);
aF(1) = 0;
return 0;
}
int MyFunctorDense::operator()(const InputType &aX, //Input
ValueType &aF) const //Output
{
//F = aX0^2 + aX1^2
for (int i = 0; i < aF.size(); i++)
{
aF(i) = i*aX(0)*aX(0) + i*(aX(1)-1)*(aX(1)-1);
}return 0;
}int MyFunctorSparse::df(const InputType &aX, JacobianType& aFjac)
{
aFjac.coeffRef(0, 0) = 2*aX(0);
aFjac.coeffRef(0, 1) = 2*aX(1);
aFjac.coeffRef(1, 0) = 0.0;
aFjac.coeffRef(1, 1) = 0.0;
return 0;
}
int MyFunctorDense::df(const InputType &aX, JacobianType& aFjac)
{
for(int i = 0; i< aFjac.size(); i++)
{
aFjac(i, 0) = 2*i*aX(0);
aFjac(i, 1) = 2*i*(aX(1)-1);
}
return 0;
}
int main(int argc, char *argv[])
{
int input;
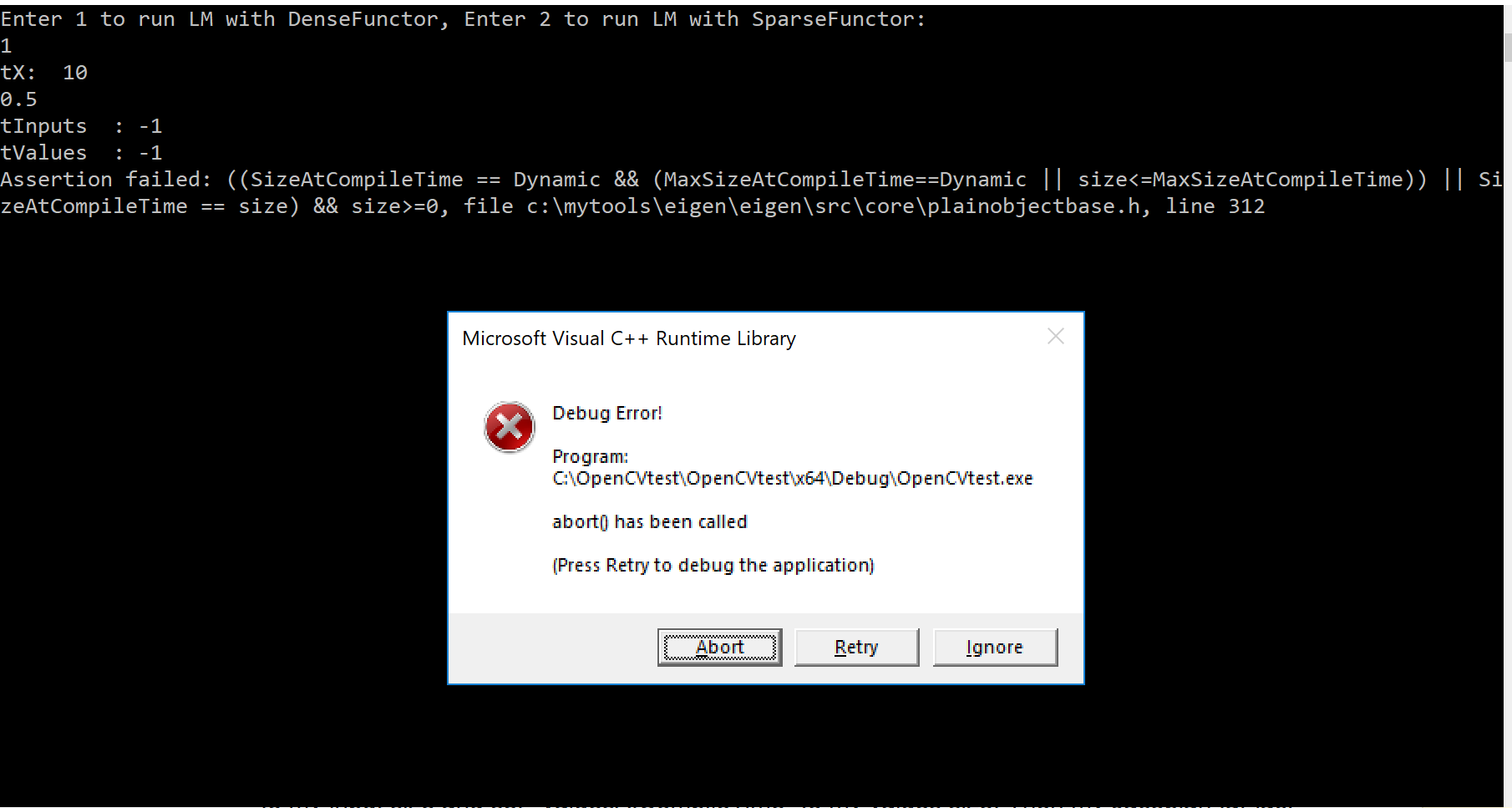
std::cout << "Enter 1 to run LM with DenseFunctor, Enter 2 to run LM with
SparseFunctor: " << std::endl;
std::cin >> input;
Eigen::VectorXd tX(2);
tX(0) = 10;
tX(1) = 0.5;
int tInputs = tX.rows();
int tValues = 60928;
std::cout << "tX: " << tX << std::endl;
if (input == 1)
{
MyFunctorDense myDenseFunctor;
tInputs = myDenseFunctor.inputs();
tValues = myDenseFunctor.values();
std::cout << "tInputs : " << tInputs << std::endl;
std::cout << "tValues : " << tValues << std::endl;
Eigen::LevenbergMarquardt<MyFunctorDense> lm(myDenseFunctor);
lm.setMaxfev(30);
lm.setXtol(1e-5);
lm.minimize(tX);
}
if (input == 2)
{
MyFunctorSparse myFunctorSparse;
//Eigen::NumericalDiff<MyFunctor> numDiff(myFunctor);
//Eigen::LevenbergMarquardt<Eigen::NumericalDiff<MyFunctor>,double>
lm(numDiff);
Eigen::LevenbergMarquardt<MyFunctorSparse> lm(myFunctorSparse);
lm.setMaxfev(2000);
lm.setXtol(1e-10);
lm.minimize(tX);
}
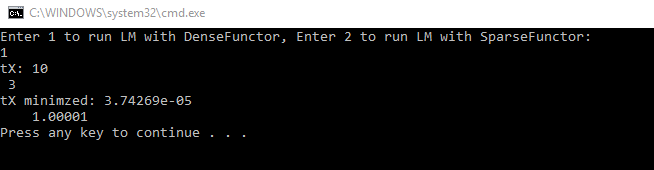
std::cout << "tX minimzed: " << tX << std::endl;
return 0;
}
Решение
РешениеЯ понял свою проблему. Я заменил:
const int m_inputs, m_values;
с
int m_inputs, m_values;
в файле «.h» это делает переменную-член struct MyFunctorDense модифицируемой. Итак, тогда в «.cpp» ниже строки
std::cout << "tX: " << tX << std::endl;
Я добавил:
Eigen::VectorXd tF(60928);
потому что это вектор тестовой функции измерения 60928×1. Поэтому я мог бы положить в любое произвольное измерение nx1.
Затем под чертой:
MyFunctorDense myDenseFunctor;
Я добавил:
myDenseFunctor.m_inputs = tX.rows();
myDenseFunctor.m_values = tF.rows();
Теперь я получаю результат:
Другие решения
Других решений пока нет …