Как спрогнозировать местоположение объекта в ближайшее время?
Предположим, что каждый объект (автомобиль, велосипед и т. Д.) Подключен к Интернету и дает мне (Облако) только свою текущую позицию и его случайный идентификатор, который меняется каждую «Т» сек. Поскольку объекты меняют свои идентификаторы, становится трудно отслеживать каждый объект, особенно в оживленном районе, например в центре города. Может кто-нибудь помочь мне спроектировать модель атакующего, которая может предсказать траектории объектов. Это означает, что Облако должно предсказать направление объектов в следующем, скажем, 15 мин.
Вы можете предположить, как 4 области A, B, C, D (5-10 км радиуса каждая), которые находятся близко друг к другу. Как я могу (в облаке) предсказать и сказать, что так много автомобилей / мотоциклов переместились из области A в область B или объекты, которые я видел в области A и через 15 минут в области B, совпадают.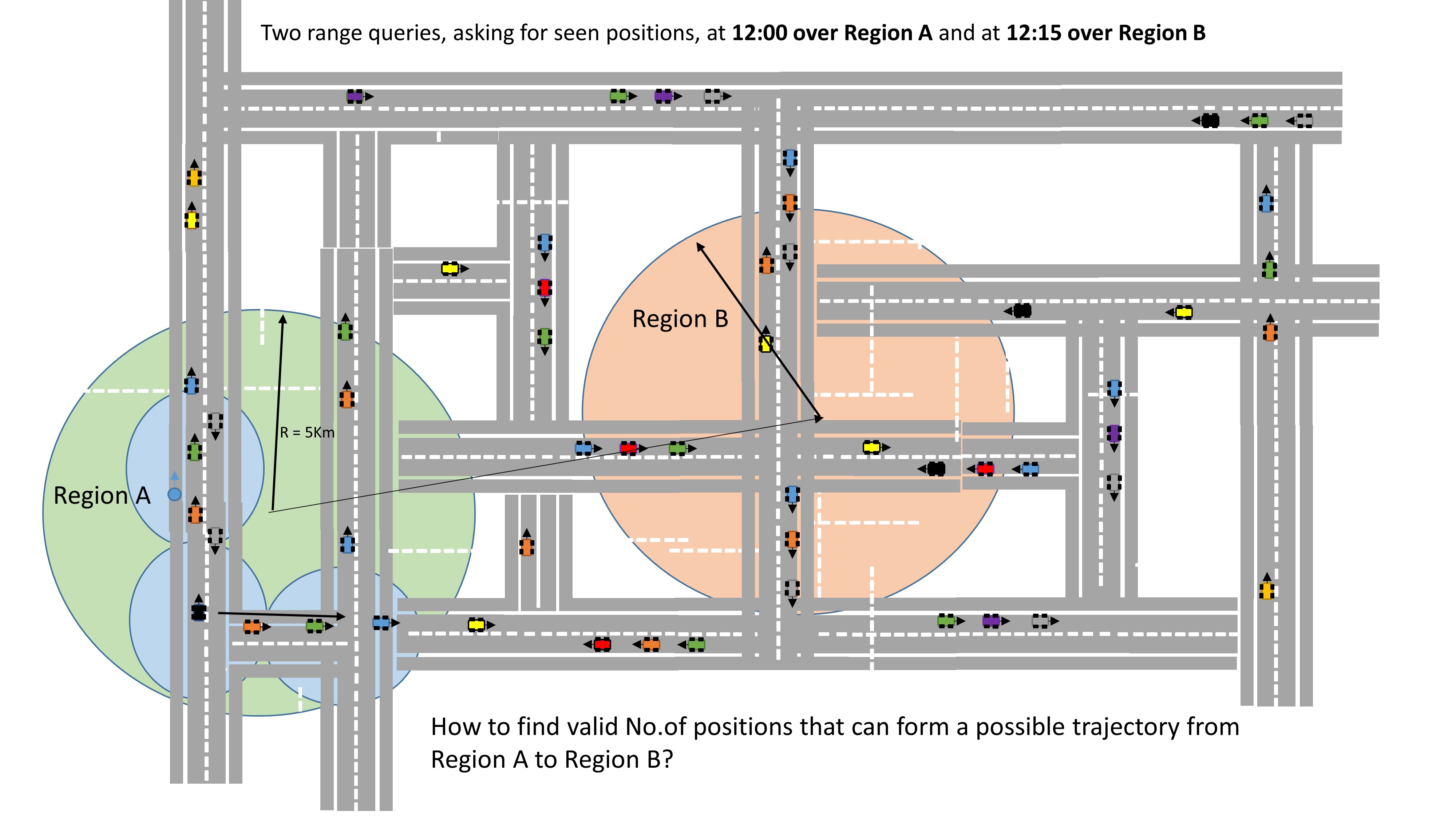
Я изучил через фильтр Калмана. В моем случае я знаю только Random Id и позиции. Поэтому первым шагом может быть угадывание скорости каждого объекта из 2 последовательных точек положения, затем формирование вектора скорости и вектора положения. Затем применение вектора положения и вектора скорости к фильтру Калмана. Каким-то образом прогнозируем положение объектов в ближайшие 15 мин. Конечно, нет необходимости быть точным, по крайней мере, вероятным рядом с регионом.
Является ли фильтр Калмана правильным выбором? Если так, то любая реализация на python или c ++ может помочь? Есть ли какая-либо другая концепция, которая может помочь в прогнозировании местоположений пользователей? Есть ли симулятор, который может помочь в симуляции этих сетей? Может кто-нибудь помочь в разработке этой модели атакующего? Большое спасибо.
Edit1:
Основная идея изменения идентификатора объекта — защитить конфиденциальность пользователя (местоположение объекта). Моя задача — разработать модель атакующего, где я могу доказать, что вы (объект) изменили свой идентификатор, но я все равно могу отслеживать вас в зависимости от скорости и направления движения. Допустим, машина едет по шоссе. Это идентификатор (предположим, 1234) в 12:00. В 12:15 он изменил свой идентификатор на 2345. так как никто не движется в том же направлении, с этой конкретной скоростью. Атакующий может сказать Id: 2345 и Id: 1234 от одного и того же объекта. Так что это действительная ссылка. Но если тот же объект движется в оживленном районе, например, в центре города. У меня есть много комбинаций, таких как повороты, автостоянки (где многие объекты сообщают об одном и том же месте с разными идентификаторами), трудно сказать, Id: 2345 от одного и того же объекта Id: 1234.
Основная цель:
Если я могу найти действительную связность объектов, видимых в регионах A (скажем, в 12:00 вечера) и в регионе B (скажем, в 12:15). Это означает, что мне нужно прогнозировать регион B, где находятся пользователи (большинство объектов) пытаемся двигаться. Иногда это может быть ложным. Поскольку главной целью является защита конфиденциальности пользователей, ложное срабатывание помогает пользователям.
Решение
Является ли фильтр Калмана правильным выбором?
-
Фильтр Калмана не поможет в тех случаях, когда будущее прогнозируемое положение зависит от того, совершит ли транспортное средство поворот. Марковская модель может работать лучше для этих случаев.
-
На трассе без поворотов фильтр Калмана будет работать лучше. Однако фильтры Калмана предполагают гауссово (нормальное) распределение шума (что, вероятно, верно только в том случае, если транспортное средство не имеет окружающего движения).
-
Фильтр Калмана без запаха может помочь компенсировать негуасианский шум, но у него тоже есть ограничения.
Если так, то любая реализация на python или c ++ может помочь?
пикальман пакет было бы хорошим местом для начала.
Другие решения
Фильтр Калмана помогает моделировать движение одного объекта. Ваша проблема в том, что вы не знаете наверняка, какие измерения (id, position) происходят из какого объекта, поскольку им разрешено изменять свои идентификаторы. Это также делает проблему отслеживания, где вам необходимо оценить для каждого объекта список идентификаторов, которые он использовал в прошлом. Причина, по которой это имеет значение, состоит в том, что из региона А в регион В может потребоваться более 15 минут, и все случайные идентификаторы, которые вы получаете из области Б, не совпадают с теми, которые вы получили от объекта, когда он находился в области А ,
Есть много работы по этим видам проблем (см. http://www.probabilistic-robotics.org/ для информации).
Я попытаюсь описать простое решение, но на самом деле это глубокая тема с большой исторической работой. Я описываю разновидность фильтра частиц здесь:
- Сохраните таблицу «Объект», которая будет содержать всю историческую информацию об объекте (то есть, автомобиль). Это сохранит исторический список пар (random-id, position), которые, по вашему мнению, использовался объектом при сообщении своей позиции.
- Каждое измерение вы получаете (случайный идентификатор, положение, время). Решите, к какому объекту он принадлежит. Как решить? Ну, во-первых, если случайный идентификатор точно совпадает с предыдущим, и этот идентификатор использовался менее 15 минут, то вы можете назначить его точно. В противном случае вам придется иметь дело со случаями, когда изменился случайный идентификатор объекта. Один очевидный алгоритм — сопоставить его с объектом, последняя измеренная позиция которого является ближайшей. В общем, ваша модель движения (например, фильтр Калмана) будет определять, как выполнить это назначение корреспонденции. Иногда вам придется решить, что измерение на самом деле новый объект, который появился из ниоткуда, или с края карты.
- Когда вы получите измерение в области B и присвоите его объекту, теперь проверьте, было ли какое-либо предыдущее измерение этого объекта в области A. Это сообщит, если у вас была ситуация, когда объект перемещался из области A в область B.
То, что я описал, — это, по сути, алгоритм онлайн-отслеживания с MAP-оценкой соответствий и подключаемой моделью движения. Алгоритм будет постоянно поддерживать список «следов» каждого уникального объекта.