Как нарисовать нужную линию из вывода функции HoughLines в OpenCV C ++?
Контекст:
Страница № 8 в этом лекция говорит, что OpenCV HoughLines функция возвращает массив линейных параметров N x 2 ро а также тета который хранится в массиве под названием линии.
Затем, чтобы на самом деле создать линии из этих углов, у нас есть некоторые формулы, а затем мы используем линия функция. Формулы объяснены ниже в коде.
Код:
//Assuming we start our program with the Input Image as shown below.
//This array will be used for storing rho and theta as N x 2 array
vector<Vec2f> lines;
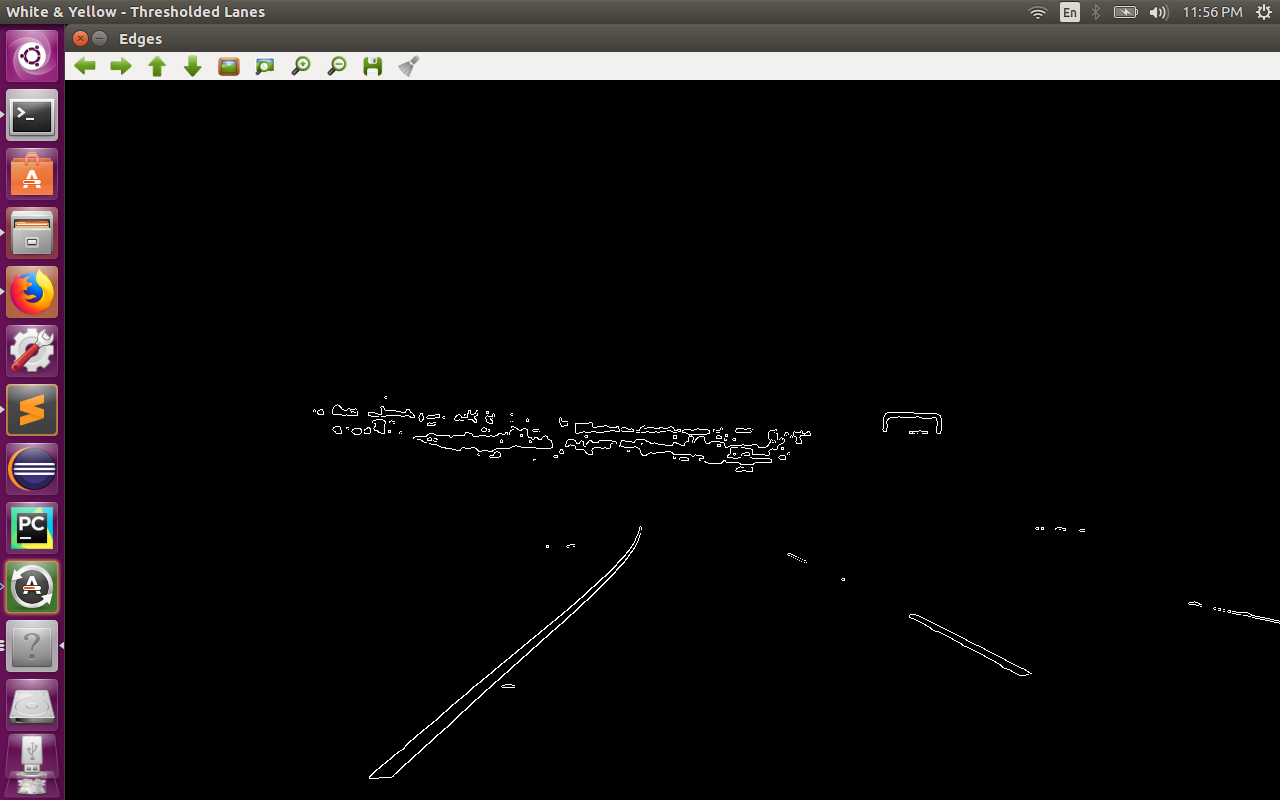
//The input bw_roi is a canny image with detected edges
HoughLines(bw_roi, lines, 1, CV_PI/180, 70, 0, 0); '
//These formulae below do the line estimation based on rho and theta
for( size_t i = 0; i < lines.size(); i++ )
{
float rho = lines[i][0], theta = lines[i][1];
Point2d pt1, pt2;
double m;
double a = cos(theta), b = sin(theta);
double x0 = a*rho, y0 = b*rho;
//When we use 1000 below we get Observation 1 output.
//But if we use 200, we get Observation 2 output.
pt1.x = cvRound(x0 + 1000*(-b));
pt1.y = cvRound(y0 + 1000*(a));
pt2.x = cvRound(x0 - 1000*(-b));
pt2.y = cvRound(y0 - 1000*(a));
//This line function is independent of HoughLines function
//and is used for drawing any type of line in OpenCV
line(frame, pt1, pt2, Scalar(0,0,255), 3, LINE_AA);
}
Входное изображение:
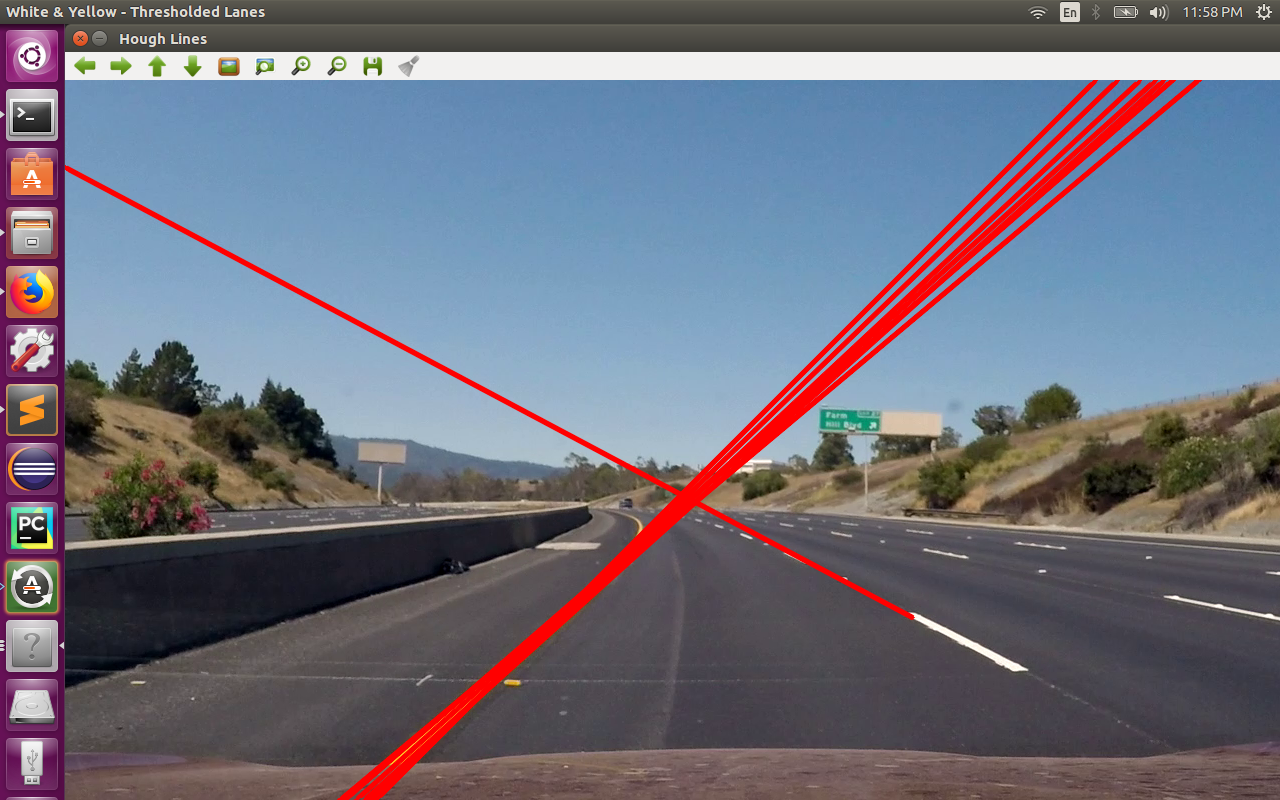
Наблюдение 1:
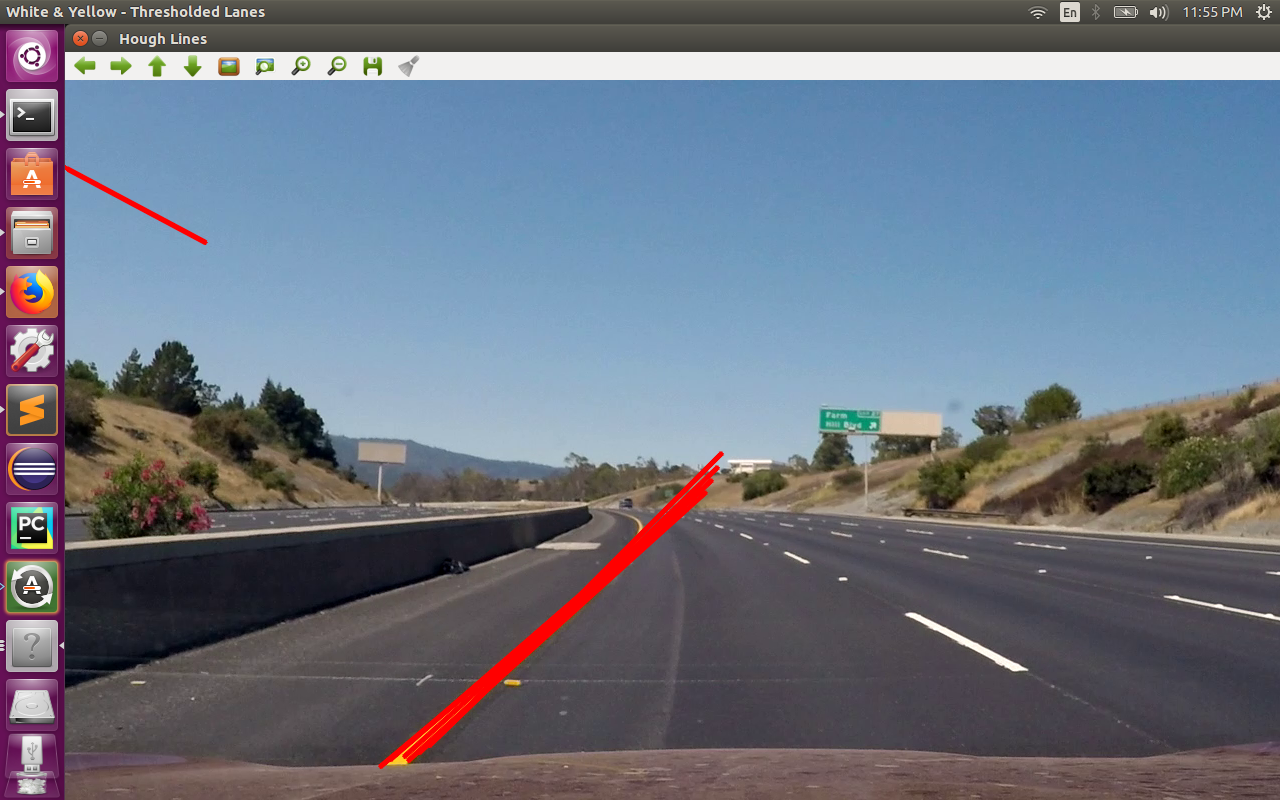
Наблюдение 2:
Проблема:
В приведенном выше коде, если мы поиграем с числом, мы умножим на a, -a, b & -б мы получаем линии разной длины. Наблюдение 2 было получено, когда я умножил на 200 вместо 1000 (что приводит к Наблюдению 1).
Для получения дополнительной информации, пожалуйста, обратитесь к комментариям в строках 18 и 19 кода, показанного выше.
Вопрос:
Когда мы рисуем линии из вывода HoughLines, как мы можем контролировать, где начинается и заканчивается наша линия?
Например, я хочу, чтобы правая полоса (красная линия, указывающая на правый нижний угол от левого верхнего угла) в Observation 2 начиналась с правого нижнего края экрана и указывала на левую верхнюю часть экрана (как зеркальное отображение левой полосы движения). ).
Решение
Дано
a = cos(theta)
b = sin(theta)
x0 = a * rho
y0 = b * rho
Вы можете написать формулу для всех точек, лежащих на линии, определенной (rho, theta) как
x = x0 - c * b
y = y0 + c * a
где c расстояние от контрольной точки (пересекается с перпендикулярной линией через начало координат).
В вашем случае вы оценили это с c = 1000 а также c = -1000 чтобы получить две точки, чтобы провести линию между.
Вы можете переписать их как
c = (x0 - x) / b
c = (y - y0) / a
А затем используйте подстановку для вычисления горизонтальных и вертикальных перехватов:
x = x0 - ((y - y0) / a) * b
или же
y = y0 + ((x0 - x) / b) * a
NB: Будьте осторожны, чтобы правильно обрабатывать случаи, когда a или же b 0
Допустим, у вас есть изображение 800×600 (чтобы цифры были простыми). Мы можем определить нижний край изображения как линию y = 599, Рассчитать стоимость x где ваша строка перехватывает его, используя приведенную выше формулу.
- Если точка пересечения находится на изображении (
0 <= x < 800), это ваша отправная точка. - Если это слева (
x < 0), найдите перехват с линиейx = 0использовать в качестве отправной точки. - Если это справа (
x >= 800), найдите перехват с линиейx = 799использовать в качестве отправной точки.
Затем используйте аналогичную технику, чтобы найти вторую точку, чтобы можно было нарисовать линию.
Другие решения
Других решений пока нет …