Как локализовать на карте трехмерный объект на двумерном изображении с помощью ROS, C ++ и OpenCV
Предположим, у меня есть остановленная видеокамера, которая записывает перед ней, а в левой части его изображения находится человек, остановленный в своем положении. Если я знаю расстояние в метрах между человеком и видеокамерой (по диагонали) и знаю, сколько пикселей находится между фронтальной осью камеры и человеком, как узнать угол между фронтальной осью и человек?
Я задаю этот вопрос, потому что я реализую узел ROS, который распознает людей на изображении с камеры и глубину объектов в ней, но я также хочу добавить маркер (который символизирует человека) на карте, которая видит сцену сверху. В узле также есть библиотеки OpenCV ..
Спасибо
Решение
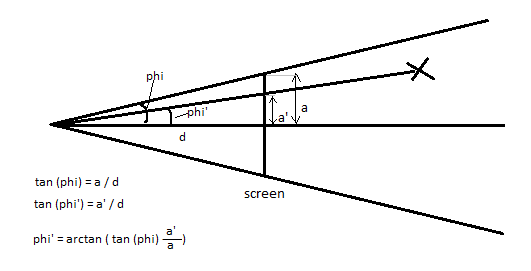
Вот как я понял вопрос. Извините за мои навыки рисования.
Другие решения
Других решений пока нет …