эффективный способ обработки двухмерных отрезков
У меня огромный набор 2D отрезков. Итак, я знаю; Номер строки,
Начало (X, Y, Z) и Конец (x, Y, Z) каждого отрезка. я хочу получить
сегменты ближней линии для данного отрезка. Аналогично для всех.Чтобы найти близость я могу подать заявку этот
Если я скажу мои данные, это как;
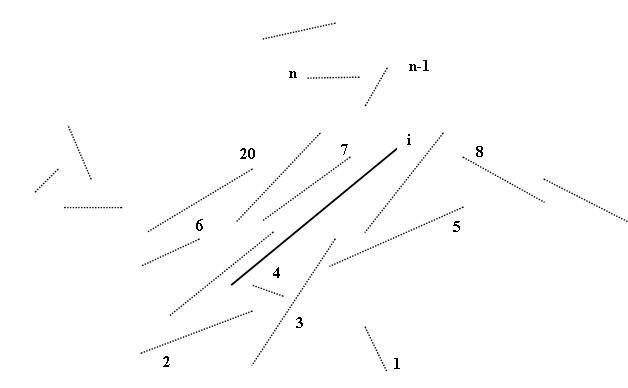
Итак, в конце Я хочу получить бесконтактные линии как вектор для каждого отрезка. Я слышал этот тип вектор вектора может быть взято с помощью структур данных r-дерева. Я искал это, но все еще не мог найти соответствующий для меня. Также я посмотрел в opencv, есть r-дерево, но оно говорит кое-что о классификаторе и фазе обучения … так что, думаю, оно мне не подходит.
Может кто-нибудь знает, как получить линия нет, то соседние линии для бывших;
1 = {2,4, 7,66,32,12}
2 = {1,4,5,6}
3 = {…} .. ..
этот тип вектора с использованием r-дерева.
Я знаю, мы можем получить этот тип векторов, используя kd-дерево. Но он рассчитан на точечные данные. Я думаю, что в этом случае сложно использовать kd-дерево.
любая помощь, пожалуйста, спасибо.
Решение
Теоретически поиск ближайших сегментов должен быть возможен с использованием любого типа структуры данных пространственного индекса или пространственного разделения. Чаще всего интерфейс такого пространственного индекса позволяет хранить Ящики (AABB) или Точки, поэтому в этих случаях вы будете вынуждены хранить ограничивающие Ящики с Сегментами, а затем после запроса ближайших Ящиков снова проверить соответствующие Сегменты. Однако можно индексировать сегменты напрямую. Например. в случае kd-дерева это будет версия, содержащая внутренние узлы, определяющие плоскости разбиения и сегменты хранения листьев.
Boost.Geometry R-дерево поддерживает сегменты в Увеличение версия 1.56.0 и выше. Ниже приведен пример для 2d сегментов, использующих эту реализацию пространственного индекса:
// Required headers
#include <iostream>
#include <boost/geometry.hpp>
#include <boost/geometry/geometries/point.hpp>
#include <boost/geometry/geometries/segment.hpp>
#include <boost/geometry/index/rtree.hpp>
// Convenient namespaces
namespace bg = boost::geometry;
namespace bgm = boost::geometry::model;
namespace bgi = boost::geometry::index;
// Convenient types
typedef bgm::point<double, 2, bg::cs::cartesian> point;
typedef bgm::segment<point> segment;
typedef std::pair<segment, size_t> value;
typedef bgi::rtree<value, bgi::rstar<16> > rtree;
// Function object needed to filter the same segment in query()
// Note that in C++11 you could pass a lambda expression instead
struct different_id
{
different_id(size_t i) : id(i) {}
bool operator()(value const& v) const { return v.second != id; }
size_t id;
};
int main()
{
// The container for pairs of segments and IDs
std::vector<value> segments;
// Fill the container
for ( size_t i = 0 ; i < 10 ; ++i )
{
// Example segment
segment seg(point(i, i), point(i+1, i+1));
segments.push_back(std::make_pair(seg, i));
}
// Create the rtree
rtree rt(segments.begin(), segments.end());
// The number of closest segments
size_t k = 3;
// The container for results
std::vector< std::vector<value> > closest(segments.size());
for ( size_t i = 0 ; i < segments.size() ; ++i )
{
// Find k segments nearest to the i-th segment not including i-th segment
rt.query(bgi::nearest(segments[i].first, k) && bgi::satisfies(different_id(i)),
std::back_inserter(closest[i]));
}
// Print the results
for ( size_t i = 0 ; i < closest.size() ; ++i )
{
std::cout << "Segments closest to the segment " << i << " are:" << std::endl;
for ( size_t j = 0 ; j < closest[i].size() ; ++j )
std::cout << closest[i][j].second << ' ';
std::cout << std::endl;
}
}
В случае, если вам нужны ВСЕ Сегменты, которые ближе, чем какой-либо порог, вы можете использовать итерационные запросы (пример).
Другие решения
Да, R-деревья могут сделать это. Они предназначены для произвольных объектов с пространственным расширением, не ограниченных точечными данными. На самом деле некоторые из самых ранних примеров, используемых многоугольники.
Вы пытались их использовать?
Построить сегментная диаграмма Вороного, затем возьмите кандидатов близости из соседних ячеек.