Использование OpenCV для обнаружения парковочных мест
Я пытаюсь использовать opencv для автоматического поиска и определения местоположения всех парковочных мест на пустой парковке.
В настоящее время у меня есть код, который пороговит изображение, применяет обнаружение неровных краев, а затем использует вероятностные линии, чтобы найти линии, которые отмечают каждое парковочное место.
Затем программа рисует линии и точки, которые составляют линии
Вот код:
#include "opencv2/highgui/highgui.hpp"#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
using namespace cv;
using namespace std;
int threshold_value = 150;
int threshold_type = 0;;
int const max_value = 255;
int const max_type = 4;
int const max_BINARY_value = 255;
int houghthresh = 50;
char* trackbar_value = "Value";
char* window_name = "Find Lines";
int main(int argc, char** argv)
{
const char* filename = argc >= 2 ? argv[1] : "pic1.jpg";
VideoCapture cap(0);
Mat src, dst, cdst, tdst, bgrdst;
namedWindow( window_name, CV_WINDOW_AUTOSIZE );
createTrackbar( trackbar_value,
window_name, &threshold_value,
max_value);
while(1)
{
cap >> src;
cvtColor(src, dst, CV_RGB2GRAY);
threshold( dst, tdst, threshold_value, max_BINARY_value,threshold_type );
Canny(tdst, cdst, 50, 200, 3);
cvtColor(tdst, bgrdst, CV_GRAY2BGR);
vector<Vec4i> lines;
HoughLinesP(cdst, lines, 1, CV_PI/180, houghthresh, 50, 10 );
for( size_t i = 0; i < lines.size(); i++ )
{
Vec4i l = lines[i];
line( bgrdst, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(0,255,0), 2, CV_AA);
circle( bgrdst,
Point(l[0], l[1]),
5,
Scalar( 0, 0, 255 ),
-1,
8 );
circle( bgrdst,
Point(l[2], l[3]),
5,
Scalar( 0, 0, 255 ),
-1,
8 );
}
imshow("source", src);
imshow(window_name, bgrdst);
waitKey(1);
}
return 0;
}
В настоящее время моей главной проблемой является выяснение того, как экстраполировать данные линии, чтобы найти местоположение каждого парковочного места. Моя цель — заставить opencv найти парковочные места и нарисовать прямоугольники на каждом парковочном месте с номером, обозначающим места.
Я думаю, что есть некоторые серьезные проблемы с методом, который я использую в настоящее время, потому что, как показано на выходных изображениях, opencv обнаруживает несколько точек на линии, отличных от двух конечных точек. Это может затруднить использование opencv для соединения 2 смежных конечных точек.
Я читал кое-что об использовании выпуклой оболочки, но я не совсем уверен, что он делает и как он работает.
Любая помощь будет оценена.
Вот выходные изображения из моей программы:
http://imageshack.us/photo/my-images/22/test1hl.png/
Решение
Подумайте об уменьшении размера вашего двоичного изображения, а затем определите конечные точки и точки ветвления. Вот один такой результат, основанный на предоставленных изображениях; конечные точки отмечены красным, а ветви — синим.
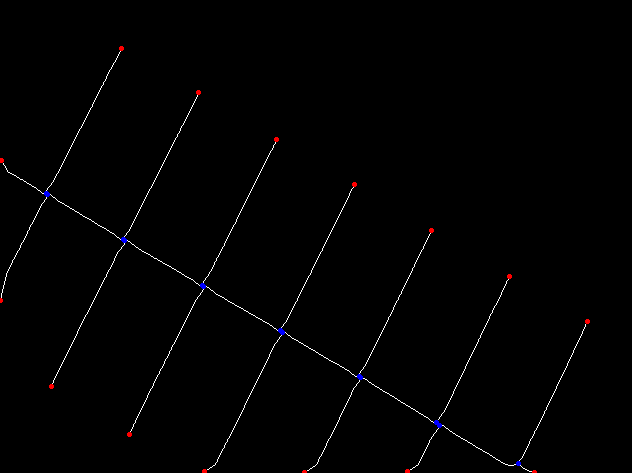
Теперь вы можете найти места парковочных мест. Пара синих точек всегда соединена одним ребром. Каждая синяя точка связана с двумя или тремя красными точками. Тогда есть несколько способов найти парковочное место, образованное двумя синими и двумя красными точками, самый простой — вдоль линий: найти ближайшую пару красных точек, где одна точка связана с определенной синей точкой, а другая красная точка связан с другой синей точкой. Этот шаг также можно дополнить проверкой того, насколько близки к параллельным линиям рассматриваемые ребра.
Другие решения
Других решений пока нет …