Hough Circles и слишком сложное решение
Так что я работаю над распознаванием йога-бала с Hough Circles. Теперь, когда преобразовано в оттенки серого, это работает сразу. К сожалению, мне нужно пройти более сложную процедуру из-за того, что таких цветных шаров было несколько, и я хотел только обнаружить синий цвет.
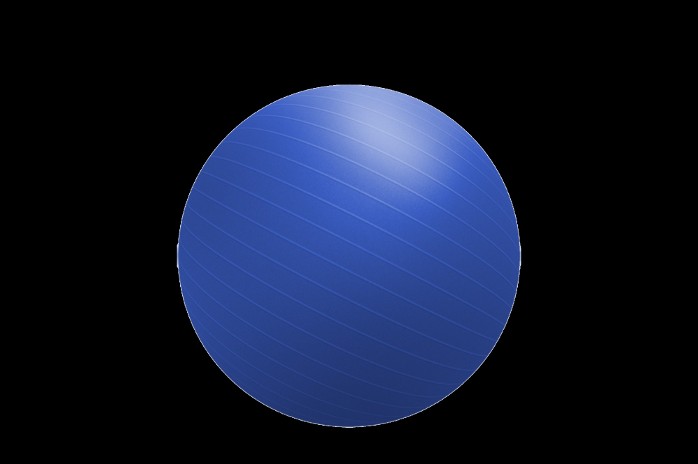
Нефильтрованный шар:
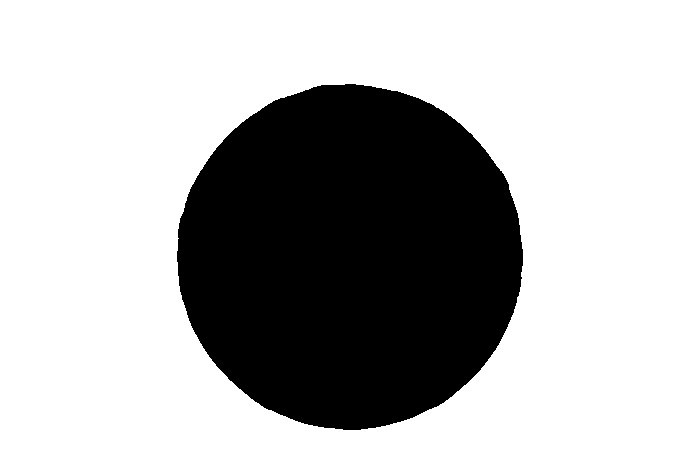
Фильтрованный мяч:
Шаги моего алгоритма:
- конвертировать из BGR в HSV
- размытие изображения
- фильтр HSV только для выбранных значений (в моем случае от синего до светло-голубого из-за освещения)
- инвертировать изображение
- использовать морфологию, чтобы заполнить ту часть, которая была освещена
- снова размыть
- Отфильтруйте размытие, чтобы получилась сплошная форма вместо неузнаваемого размытого оттенка серого
- обнаружить с кругами. MAT по-прежнему Grayscale, так что это не проблема.
Код:
#include <iostream>
#include <string>
#include <iomanip>
#include <sstream>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
using namespace std;
using namespace cv;
int main(int argc, char *argv[])
{
// Morphology stuff
Mat element5(30, 30, CV_8U, Scalar(1));
int morph_elem = 1; // 2
int morph_size = 33;// 30
int morph_operator = 2; // 2
Mat element = getStructuringElement(morph_elem, Size(2 * morph_size + 1, 2 * morph_size + 1), Point(morph_size, morph_size));
int const max_operator = 4;
int const max_elem = 2;
int const max_kernel_size = 21;
Mat kernel;
// Display Windows Name
namedWindow("Testing Purposes", CV_WINDOW_AUTOSIZE);
Mat src; // loaded image
Mat hsv; // changed src into HSV
Mat Filtered; // filtered w/ inRange for blue ball
Mat Gray; // gray filter for src
Mat dst; // destination for canny edge
Mat detected_edges; // matrix of edges w/ canny
// thresholds for canny
int edgeThresh = 45;
int lowThreshold;
int const max_lowThreshold = 100;
src = imread(argv[1]);
cvtColor(src, Gray, CV_BGR2GRAY);
cvtColor(src, hsv, CV_BGR2HSV);
/*
// CannyEdge Testing
blur(Gray, detected_edges, Size(3, 3)); // blur the grayimage
Canny(detected_edges, detected_edges, lowThreshold, lowThreshold * ratio, kernel_size);
dst = Scalar::all(0);
src.copyTo( dst, detected_edges);
imshow(window_name,dst);
*/
// hsv blur and then thresholds
blur(hsv,hsv,Size(4, 4), Point(-1, -1));
inRange(hsv, Scalar(100, 100, 0), Scalar(200, 200, 255), Filtered); //filtering after blur
vector<Vec3f> circles; //vector for holding info on circles
// houghcircles - attempts to detect circles in the Filtered image we passed it
// morphology defintion for Kernel
bitwise_not(Filtered, Filtered);
// imwrite("/home/bjacobs/Desktop/Testing.jpg", Filtered);
imwrite("/home/bjacobs/Desktop/Testingg.jpg", Filtered);
morphologyEx(Filtered, dst, MORPH_OPEN, element);
blur(dst, dst, Size(20, 20), Point(-1, -1));
Mat baw = dst > 128;
HoughCircles(baw ,circles, CV_HOUGH_GRADIENT, 1, baw.rows/8,200,100,0,0);
imwrite("/home/bjacobs/Desktop/Testing.jpg", baw);
// Draw the circles detected onto the SRC file
for(size_t i = 0; i < circles.size(); i++)
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][3]));
int radius = cvRound(circles[i][2]);
// circle center
circle(src, center, 3, Scalar(0, 255, 0), -1, 8, 0);
// circle outline
circle(src, center, radius, Scalar(0, 0, 255), 3, 8, 0);
}
imwrite("/home/bjacobs/Desktop/Test.jpg", hsv);
imshow("Testing Purposes", src);
waitKey(0);
}
Я уже прочитал столько, сколько я мог онлайн в этом вопросе, и ничто, что я нашел пока, не помогло. Простите за небрежное комментирование, и есть некоторые ошибочные алгоритмы, включенные с использованием обнаружения Canny Edge, так что не обращайте на них слишком много внимания. Кто-нибудь знает решение этой проблемы обнаружения?
Решение
Вместо использования houghcircle вы можете сделать следующее.
-
Сегментируйте синий цвет.
-
Найти контуры (самые большие).
-
Минимальный окружающий круг для контура.
Другие решения
Других решений пока нет …