findChessboardCorners не удается для калибровочного изображения
Я пытаюсь заставить OpenCV 2.4.5 распознавать шахматную доску по моей веб-камере. Я не мог заставить это работать, поэтому я решил попытаться заставить это работать, просто используя «прекрасное» изображение:
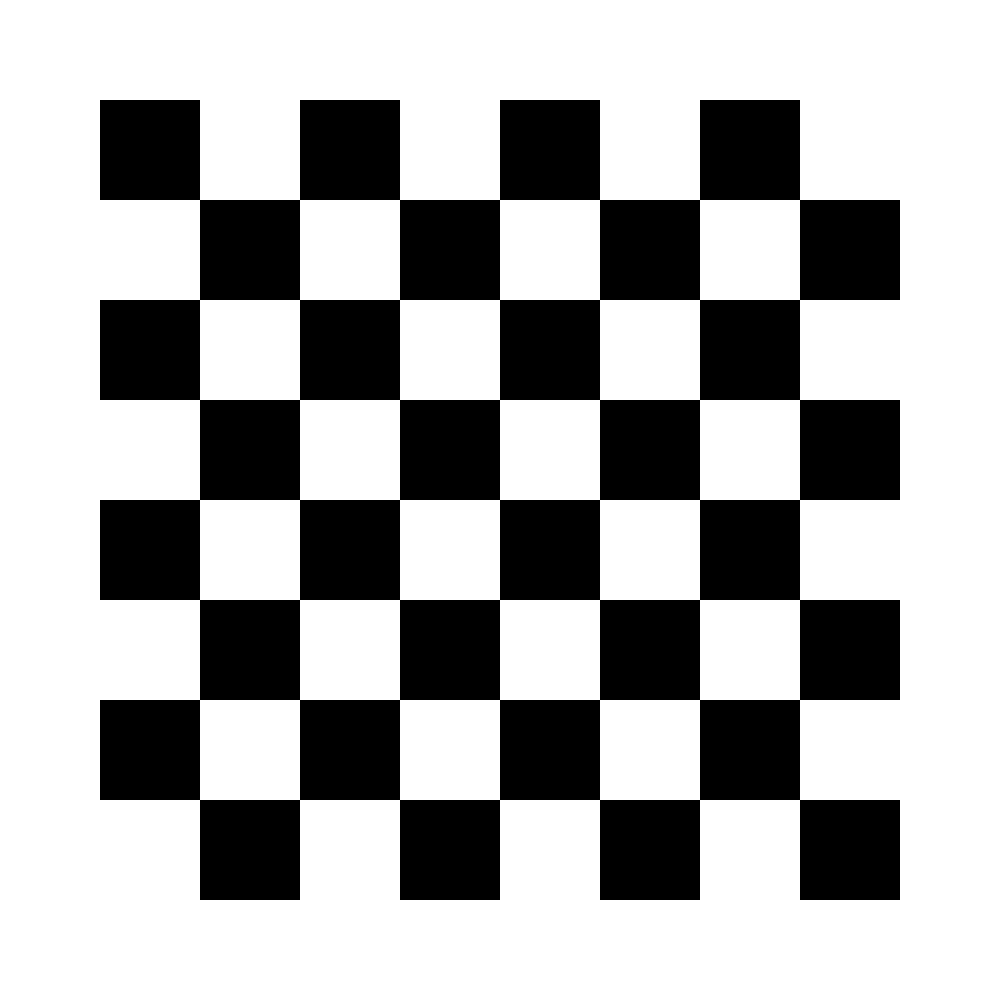
но это все равно не будет работать — patternFound каждый раз возвращает false. Кто-нибудь знает, что я делаю не так?
#include <stdio.h>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/calib3d/calib3d.hpp>
#include <opencv2/highgui/highgui.hpp>
using namespace cv;
using namespace std;
int main(){
Size patternsize(8,8); //number of centers
Mat frame = imread("perfect.png"); //source image
vector<Point2f> centers; //this will be filled by the detected centers
bool patternfound = findChessboardCorners(frame,patternsize,centers);
cout<<patternfound<<endl;
drawChessboardCorners(frame, patternsize, Mat(centers), patternfound);
cvNamedWindow("window");
while(1){
imshow("window",frame);
cvWaitKey(33);
}
}
Решение
Методом проб и ошибок я понял, что размер шаблона должен быть 7х7, поскольку он учитывает внутренние углы. Этот параметр должен быть точным — 8×8 не будет работать, но не будет ничего меньше, чем 7×7.
Другие решения
Вместо того, чтобы использовать
Size patternsize(8,8);
использование
Size patternsize(7,7);
Ширина и высота шахматной доски не могут быть одинаковой длины, то есть она должна быть ассиметричной. Это может быть источником вашей проблемы.
Вот очень хороший урок о калибровке камеры с OpenCV.
Чуть ниже приведен код, который я использую для калибровки (проверенный и полностью функциональный, ОДНАКО я называю его в каком-то собственном потоке обработки, вы должны вызывать его в цикле обработки или во всем, что вы используете для захвата ваших кадров):
void MyCalibration::execute(IplImage* in, bool debug)
{
const int CHESSBOARD_WIDTH = 8;
const int CHESSBOARD_HEIGHT = 5;
const int CHESSBOARD_INTERSECTION_COUNT = CHESSBOARD_WIDTH * CHESSBOARD_HEIGHT;
//const bool DO_CALIBRATION = ((BoolProperty*)getProperty("DoCalibration"))->getValue();
if(in->nChannels == 1)
cvCopy(in,gray_image);
else
cvCvtColor(in,gray_image,CV_BGR2GRAY);
int corner_count;
CvPoint2D32f* corners = new CvPoint2D32f[CHESSBOARD_INTERSECTION_COUNT];
int wasChessboardFound = cvFindChessboardCorners(gray_image, cvSize(CHESSBOARD_WIDTH, CHESSBOARD_HEIGHT), corners, &corner_count);
if(wasChessboardFound) {
// Refine the found corners
cvFindCornerSubPix(gray_image, corners, corner_count, cvSize(5, 5), cvSize(-1, -1), cvTermCriteria(CV_TERMCRIT_ITER, 100, 0.1));
// Add the corners to the array of calibration points
calibrationPoints.push_back(corners);
cvDrawChessboardCorners(in, cvSize(CHESSBOARD_WIDTH, CHESSBOARD_HEIGHT), corners, corner_count, wasChessboardFound);
}
}
На случай, если вам интересно узнать об участниках класса, вот мой класс (IplImage все еще был на момент написания):
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv/cv.h>
class MyCalibration
{
private:
std::vector<CvPoint2D32f*> calibrationPoints;
IplImage *gray_image;
public:
MyCalibration(IplImage* in);
void execute(IplImage* in, bool debug=false);
~MyCalibration(void);
};
И, наконец, конструктор:
MyCalibration::MyCalibration(IplImage* in)
{
gray_image = cvCreateImage(cvSize(in->width,in->height),8,1);
}